
17 jan. 2024
4 minuten
Is een vaste afscherming en een veilige gebiedsbeperking veilig genoeg rond een palletiseerrobot of moeten er daarnaast nog andere veiligheidsmaatregelen worden genomen voor de veiligheid van de medewerkers?
Ons bedrijf levert een industriële robot die moet palletiseren, maar vanwege weinig ruimte bij de klant moeten er gebieden afgeschermd worden met een vaste afscherming, zodat medewerkers veilig om de robotcel heen kunnen lopen.

Figuur 1: Voorbeeld van een robotpalletiseercel, dit is niet de palletiseerrobot uit de vraag. (Bron: Website Motoman-Yaskawa).
Een collega benoemde tijdens de risicobeoordeling het volgende scenario: “Stel de robot slaat op hol, door bijvoorbeeld een programmeerfout of iets dergelijks. Het is dan goed mogelijk dat de robot door het hek heen slaat en een medewerker buiten het hek verwondt.”
Wij hebben een vaste afscherming geplaatst en in de robotcontroller ook een veilige gebiedsbescherming geprogrammeerd.
Vraag
Onze vraag is nu: Is een vaste afscherming en een veilige gebiedsbeperking dan veilig genoeg of moeten er daarnaast nog andere veiligheidsmaatregelen worden genomen?
Antwoord
Het door uw collega genoemde scenario is zeker realistisch te noemen en er dienen dan ook risicoreducerende maatregelen voor worden genomen.
Bij het integreren van een losse robot in een robotcel dient de integrator in ieder geval de volgende normen toe te passen:
- EN-ISO 10218-1:2011; Robots en robot apparatuur – Veiligheidseisen – Deel 1: Industriële robots.
- EN-ISO 10218-2:2011; Robots en robot apparatuur – Veiligheidseisen voor industriële robots – Deel 2: Robot systemen en integratie.
- ISO/TR 20218-1:2018; Robotics – Safety design for industrial robot systems – Part 1: End-effectors.
- ISO/TR 20218-2:2017; Robotics – Safety requirements for industrial robots – Part 2: Manual load/unload stations.
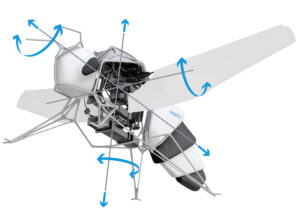
Bij het engineeren van een robotcel dient de fabrikant, volgens de norm EN-ISO 10218 deel 2, onderscheid te maken tussen de volgende vier bewegingsgebieden:
- Maximaal bereik (maximum space): Ruimte bepaald door het uiterste bereik van de bewegende robot ruimte, zoals gedefinieerd door de fabrikant, plus de ruimte die met end-effector en het werkstuk kan worden bereikt.
- Beveiligde ruimte (safeguarded space): Ruimte afgebakend door de buitenste rand van beveiligingsvoorzieningen (afschermingen, lichtschermen, etc.)..
- Begrensde ruimte (restricted space): Dat deel van de maximale ruimte die wordt beperkt door middel van mechanische en elektronische begrenzingsvoorzieningen, die grenzen stellen die niet overschreden kunnen worden.
- Werkruimte robot (operating space): Deel van de begrensde ruimte dat daadwerkelijk door de robot wordt gebruikt tijdens het uitvoeren van alle geprogrammeerde bewegingen.

Figuur 2: Uitleg verschillende ruimten, bron: website ABB.
De norm EN-ISO 10218-2 geeft in hoofdstuk 5.4 Limiting robot motion, de eisen voor gebiedsbescherming (of restricted space) van een robot. Er zijn twee mogelijke oplossingen:
Limiting devices fall into two categories: mechanical limiting devices and non-mechanical limiting devices.
Mechanical limiting devices physically restrain the robot from moving beyond a designed limit. Non- mechanical limiting devices do not limit the robot motion themselves, but rather initiate a stop through the robot control system. Non-mechanical limiting devices therefore require the integrator to take the robot stopping distance into account when establishing the restricted space of the robot.
Het is dus mogelijk gebruik te maken van mechanische of niet-mechanische begrenzing van de robotassen. Praktisch is het vaak wel mogelijk om een mechanische stop op as 1 te zetten, maar voor de andere robotassen is een elektromechanische of elektronische (softwarematige) begrenzing geschikter.
Een niet-mechanische begrenzing is dus besturingstechnisch en die dient volgens de norm minimaal voldoen aan eisen uit EN-ISO 10218-2 par. 5.2.2. Een veiligheidsgerelateerde softwarematige as- en ruimtebegrenzing is toegestaan als dit de robot kan stoppen bij volle belasting en snelheid. Deze softwarematige restricted space mag niet door de operator veranderd kunnen worden en voert geen noodstop maar een beschermende stop uit.
De safety-related control system performance (hardware/software) dient volgens EN-ISO 10218-1 deel 2 par 5.2.2 ten minste voldoen aan de volgende prestatiecriteria:
- A. Performance Level (PL) “d” met de structuur van categorie 3, zoals beschreven in de norm EN-ISO 13849-1 of,
- B. Safety Integrity Level; SIL 2 met hardware fouttolerantie van 1 (redundantie) en een prooftest interval van < 20 jaar conform de norm EN 62061.
Met andere woorden: Als de robotcontroller beschikt over een manier om een restricted space te programmeren en dit voldoet aan de hiervoor genoemde eisen zal worden voldaan aan de stand der techniek, zoals weergegeven in de geharmoniseerde norm voor robotintegratie (EN-ISO 10218-1 deel 2).
Deze vraag is beantwoord door Fusacon BV


Anderen lazen ook



{kind=link}