
27 mrt. 2023
2 minuten
Zo’n 12.000 vierkante kilometer land is wereldwijd onbruikbaar omdat er misschien explosieven begraven liggen, en duizenden mensen raken jaarlijks gewond of komen om het leven door mijnen. Ze zijn namelijk nog niet zo eenvoudig op te ruimen. Maar daar is nu een oplossing voor.
Hoewel er veel verschillende manieren zijn om mijnen en explosieven te detecteren, is geen enkele bijzonder snel of gemakkelijk. Om zelf niet met een metaaldetector een mijnenveld in te hoeven, sturen mensen alles wat ze maar kunnen het veld in, van machines tot getrainde ratten die explosieven kunnen ruiken.
Omdat de meeste mijnen worden geactiveerd door druk of directe nabijheid, lijkt de drone de ideale mijndetector. Echter, als het oppervlak niet perfect vlak is, is hij niet ideaal gepositioneerd en mis je misschien iets.
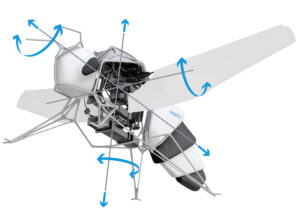
Maar nu is een nieuwe combinatie van een metaaldetector en een drone met 5 graden bewegingsvrijheid in ontwikkeling bij het Autonomous Systems Lab aan de ETH Zürich. Die kan zorgvuldig detecteren en lokaliseren, terwijl enkele motoren de detector betrouwbaar dicht bij de grond houden.
Het lastige is om ervoor te zorgen dat de metaaldetector in de juiste richting ten opzichte van het grondoppervlak blijft, zodat de effectiviteit ervan niet afneemt. Bij een conventionele drone moet de drone elke keer dat hij in een willekeurige richting beweegt, behalve omhoog of omlaag, kantelen. De drone die in dit onderzoek wordt gebruikt, gemaakt door een bedrijf genaamd Voliro (een startup met zijn wortels in het Autonomous Systems Lab aan de ETH Zürich), is een tricopter die roterende voortstuwingsgondels gebruikt die onafhankelijk van het lichaam van de drone bewegen.
Het besturingssysteem moet de drone over een 3D-oppervlak kunnen besturen dat het nog nooit eerder heeft gezien en mogelijk obstakels bevat. Daarbij moet het prioriteit geven aan de uitlijning van de detector. De onderzoekers combineren GPS met traagheidsmetingen van Lidar die op de drone is gemonteerd voor absolute positie- en toestandsschatting, en die plot vervolgens autonoom een pad met haarspeldbochten uit over een interessegebied en voert dit uit
Testen met metalen (niet-explosieve) doelen toonden aan dat dit systeem het erg goed doet, zelfs in gebieden met obstakels in het horizontale en verticale vlak en een aanzienlijke helling.


Geef een reactie
Reacties (1)
Anderen lazen ook

Mooie ontwikkeling. Suggestie metaaldetector met een soort luchtkussentje op de juist hoogte fijne tuning ter ondersteuning van het huidige systeem.