
25 mrt. 2024
2 minuten
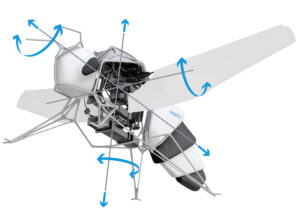
Het exoskelet van TU Delft studententeam Project March zal dit jaar een nieuwe enkelbeweging kunnen maken, om zo het gebalanceerd lopen zonder krukken en lopen op een schuine wand te stabiliseren. Daarnaast zullen er camera’s in het exoskelet komen, die de omgeving scannen en op basis daarvan snel een geschikt looppatroon uitstippelen.
Dit maakt het mogelijk om dynamisch te lopen en bijvoorbeeld trappen op en af te lopen. Ook wordt de communicatie naar de verschillende gewrichten van het exoskelet verbeterd voor hogere betrouwbaarheid en snelheid.
Nieuw enkelgewricht
Het negende team van Project March heeft zich gefocust op het implementeren van een nieuw enkelgewricht dat de inversie- en eversie beweging van de enkel mogelijk maakt (de kanteling van de enkel). Deze beweging zorgt ervoor dat het lopen over een schuine wand makkelijker wordt en het draagt positief bij aan het balanceren van het exoskelet zonder krukken.
March motor controller
De gewrichten en andere elektronische componenten van het exoskelet moeten worden aangestuurd. Om ervoor te zorgen dat die communicatie snel is en zo de reactiesnelheid van het exoskelet verhoogd wordt, zal het March IX team focussen op het ontwikkelen van een nieuwe motor controller.
Lichter ontwerp exoskelet voor verbeterde besturing door de piloot
Dit jaar is er gefocust op het lichter maken van het exoskelet. Zo is het frame van de benen, de ‘botten’ van het exoskelet, 40% lichter gemaakt ten opzichte van vorig jaar, met als gevolg een gemakkelijkere besturing door de piloot. Ook werd het ontwerp van de rotational joints in de knie en heup vernieuwd, resulterend in bijna drie kilo gewichtsverlies. In totaal wordt het exoskelet van Project March IX 20% lichter dan voorgaand model.
Cybathlon 2024
Project March zal deelnemen aan de Cybathlon 2024 in Zürich waar de piloot tien obstakels moet nemen die zijn gebaseerd op het dagelijks leven, zoals traplopen, zitten en opstaan en lopen zonder krukken. Binnen tien minuten. Het exoskelet moet dus effectief veel verschillende bewegingen maken, aangestuurd door de piloot.


Anderen lazen ook


