25 apr. 2019
9 minuten

Dat Festo inspiratie put uit de ontwerpen die Moeder Natuur in de loop van miljoenen jaren heeft geperfectioneerd, is genoegzaam bekend. Met een behoorlijke Bionic-‘dierentuin’ als resultaat. Maar na onder andere roggen, kwallen, pinguïns, kangoeroes, vleerhonden, vlinders, meeuwen, mieren en spinnen is het nu toch wel eens tijd voor een evolutionair uitdagender stap.
Een intelligente BionicHuman is het natuurlijk nog niet maar met een BionicSoftHand is het begin gemaakt. En uiteraard gecombineerd met kunstmatige intelligentie anders zou het geen uitdaging zijn. Eind februari had Festo daar in de aanloop naar de inmiddels alweer afgelopen Hannover Messe een korte online persconferentie over belegd. Met als centrale vragen ‘Hoe gaat kunstmatige intelligentie de productie beïnvloeden?’ en ‘Wordt in navolging van de zelfsturende auto ook de industriële productie ‘zelfsturend’?’.
Eén ei, twee ei, paasei
Volgens Dionysios Satikidis, Digital Strategy and Business Model bij Festo, zijn de verschillende stadia die binnen kunstmatige intelligentie kunnen worden onderscheiden, vergelijkbaar met de stadia die een kind doormaakt. Dat maakt Constructeur in elk geval op uit zijn uitleg, maar controleer dat gerust hier.
Allereerst gaat het om waarneming – vergelijkbaar met de toepassing van algoritmes in machine learning. Zonder te weten wat je ziet kun je daar al wat mee: een anomalie detecteren en objecten of vormen clusteren. Deep learning voegt aan die waarneming ook de ‘herinnering’ toe om bijvoorbeeld het voorwerp in kwestie daadwerkelijk te herkennen en te benoemen als een kubus of cilinder. In de menselijke analogie valt spreken onder deze noemer. Deep learning in de automatisering vraagt immense hoeveelheden data. Want iedereen weet: een ei is geen ei, twee ei is een half ei en drie ei is een paasei.
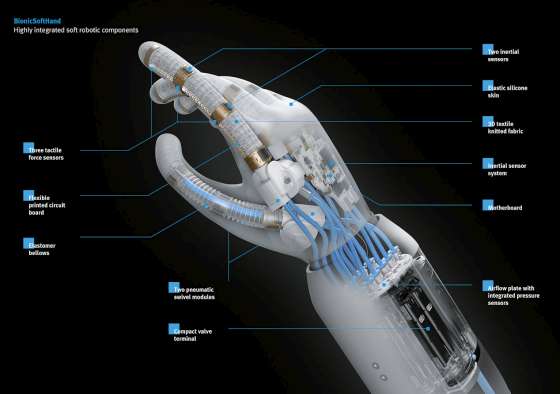 De BionicSoftHand is vrijwel geheel opgebouwd uit zachte en flexibele materialen en heeft geen inwendig ‘skelet’.
De BionicSoftHand is vrijwel geheel opgebouwd uit zachte en flexibele materialen en heeft geen inwendig ‘skelet’.
Je wilt aan die herkenning ook vaardigheden koppelen. Als het voorwerp is herkend volgt een handeling. Levert die handeling een gewenst resultaat dan volgt dat uit de terugkoppeling. Aan de waarneming wordt via herkenning en herinnering een actie gekoppeld die een gewenst resultaat oplevert: reinforcement learning. In de automatisering kun je daar ook simulaties voor gebruiken om dit proces te versnellen. Op deze wijze verrijken ook de computerbordspellen als schaken en AlphaGo, games zoals Assasin’s Creed en robots hun ‘kennis’: het vinden van adequate acties die in een gegeven situatie tot een maximaal resultaat leiden.
Knuffel
Maar waar het uiteindelijk om te doen is: kan bijvoorbeeld de vaardigheid ook zonder aanwijzing worden geïnterpreteerd als actie voor andere vormen? Stel je een kind voor met zo’n leuke kubus met gaten in verschillende vormen. Waar eerst alleen een pen in een rond gat hoefde te worden geduwd en moeder dat beloonde met bijvoorbeeld een knuffel – reinforcement learning – zijn er nu driehoekige, vierkante en andere blokjes. Is dan duidelijk wat de bedoeling is zonder dat mama dat nog voor doet? Is dat het geval dan is sprake van transfer learning. Zodra kunstmatige intelligentie eindelijk in staat is om verworven kennis over te dragen naar onbekende taken, is transfer learning een feit en dat kan in de laatste fase leiden tot autonome automatisering, aldus Satikidis.
BionicSoftHand
Maar daar is Festo ook nog niet. Waar dan wel illustreert Elias Knubben hoofd Corporate Research and Innovation, met de BionicSoftHand, een bijna geheel uit zachte en flexibele materialen vervaardigde robothand zonder inwendig ‘skelet’. Wie op de Hannover Messe bij Festo is geweest, heeft het zelf kunnen aanschouwen. Ook hier gaat het om reinforcement learning. Uiteindelijk moet de ‘robothand’ een dodecaëder, een ruimtelijk object met twaalf vijfhoekige vlakken, zo draaien dat een specifieke zijde bovenligt. Hoe de hand, die niet over een skelet beschikt zoals bij de mens dat precies doet, moet de achterliggende besturing zelf maar uitzoeken. Proberen dus en op basis van de feedback worden de opeenvolgende acties geoptimaliseerd tot de opdracht succesvol is opgelost.
Daarbij wordt uiteraard – het is 2019 – gebruik gemaakt van een Digital Twin. Het systeem is uitgerust met een Leap Motion-camera die op basis van algoritmes uit een stereobeeld een 3D-beeld genereert. De gevolgen van de vingerbewegingen om tot een optimale bewegingsstrategie te worden ingevoerd in de virtuele omgeving. Uiteindelijk kunnen met behulp van algoritmes razendsnel parallel virtueel de verschillende alternatieven worden afgewogen en de optimale strategie worden ‘geleerd’ om van een gegeven uitgangspositie tot de oplossing te komen.
 ‘Textiele werkvormen’: behalve de BionicSoftHand dankt ook de nieuwe modulaire BionicSoftArm zijn bewegingsvrijheid aan balgen en 3D-geweven textiel en de Motion Terminal.
‘Textiele werkvormen’: behalve de BionicSoftHand dankt ook de nieuwe modulaire BionicSoftArm zijn bewegingsvrijheid aan balgen en 3D-geweven textiel en de Motion Terminal.
3D-textiel
Die oplossing wordt aan de hardware doorgestuurd om zo de hand – die afhankelijk van de oriëntatie 4 kg moet kunnen hanteren – te laten functioneren. De vingers van de hand zijn opgebouwd uit balgen met elk twee drukkamers. Zijn beide kamers leeg dan zijn de vingers gestrekt. De balgen zijn omhuld met een 3D-textiel. Dit uit Dynemaa-kunststofvezel geweven textiel is zo vormgeven dat de balg op specifieke locaties kan uitzetten, zodat met behulp van de lucht kracht kan worden uitgeoefend. In de lengterichting kunnen de ‘vingerkootjes’ als ze onder druk worden gezet door constructieve beperkingen niet verlengen met als resultaat dat ze buigen. De uiteindelijke huid is een siliconen omhulsel.
Twaalf vrijheidsgraden
De hand beschikt over twaalf vrijheidsgraden: tien via het buigen van de vingers en twee via de zijwaartse, laterale beweging van de duim en wijsvinger. In de vingers bevinden zich aan de onderzijde drie krachtsensoren en aan de bovenzijde twee massatraagheidssensoren voor de positiebepaling, van de vingers. De sensoren zijn geïntegreerd in een flexibele printplaat over de lengte van de vinger. Het moederbord voor de besturing zit op de rug van hand. In de ‘pols’ zit het ventielblok met twaalf piëzo-cartridges met elk twee piëzo-actuatoren. Voor de kenners: dat zijn dezelfde cartridges die worden toegepast in Festo’s universele ventielen die in de VTEM Motion terminal worden gebruikt. De 24 piëzo-actuatoren staan op hun beurt in verbinding met een 3D-geprinte (SLA) ventielplaat en hierop zijn de luchtslangen aangesloten die naar de vingers lopen.
BionicSoftArm
Van de BionicSoftHand is het natuurlijk een kleine stap naar een BionicSoftArm. Zeker als je die eigenlijk toch al in je portfolio had. Want de bionische arm is eigenlijk een doorontwikkeling van de BionicMotionRobot (2017) en de Bionic Handling Assistent (2010) die wat beweging betreft waren geïnspireerd op inktvistentakels en de slurf van een olifant.
De configuratie van de SoftArm is modulair en bestaat uit maximaal zeven balgsegmenten en pneumatische rotatie-aandrijvingen. Elk balgsegment beschikt over twee kamers en levert één vrijheidsgraad om de ‘closed loop’-besturing niet overmatig complex te maken. In totaal kan de SoftArm dus over maximaal zeven vrijheidsgraden beschikken. De elastomeer balgen zijn bedekt met twee lagen 3D-geweven textiel. Allereerst is er een zachte laag die de balgen tegen wrijving en slijtage beschermt. De hoge-sterkte vezels van de tweede laag bepalen in welke richting de balgen wél en in welke richting ze niet kunnen uitzetten.
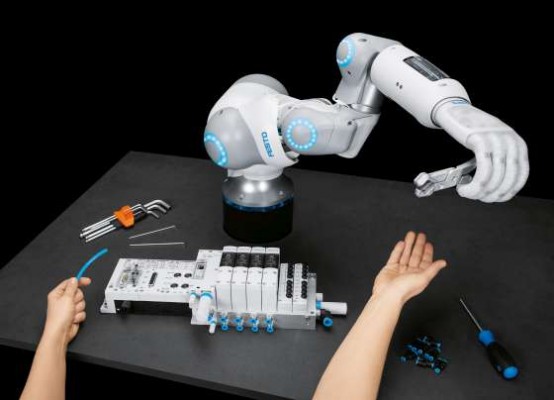 De BionicSoftHand als extra handje voor de mens.
De BionicSoftHand als extra handje voor de mens.
Voor de besturing van de kinematica worden de Motion Terminal en de algoritmes in de bijbehorende ‘motion apps’ gebruikt. De bewegingen van de arm zijn positie-gestuurd en gebaseerd op een model. Elk onderdeel van de robot is een model. De parameters worden berekend of afgeleid via parameteridentificatie. De besturingsalgoritmes draaien real time in de Motion Terminal. Programmering heeft plaats via de Robotic Suite via een grafische gebruikersinterface op een tablet, die voor het eerst is gebruikt in de BionicCobot uit 2017. De gebruiker kan met de tablet de acties ingeven. ‘Drag&drop’- functionaliteit maakt het mogelijk de verschillende acties op elk moment anders te rangschikken. Het open source Robotic Operating System fungeert als interface tussen Robotic Suite en Motion terminal.
‘Aaibaarheidsfactor’
Nu is ‘aaibaarheidsfactor’ niet het goede woord, maar wie ooit de Festo-stand heeft bezocht op de Hannover Messe weet hoe groot de belangstelling is voor alle Bionic-creaties. Herkenbaarheid is daar ongetwijfeld debet aan. Als het tot een directe samenwerking komt tussen mens en robot, cobot of hoe het beestje ook mag heten, dan kan herkenbaarheid de acceptatie ongetwijfeld helpen vergroten. De suggestie dat omdat het allemaal maar ‘lucht’ is, dergelijke concepten veilig zijn in de nabijheid van de mens is een andere vraag. Een lel van een BionicSoftHand – aan een BionicSoftArm – die een object van 4 kg manipuleert komt nog steeds hard aan. Voor welke taken de BionicSoftHand en -Arm in welke collaboratieve vormen uiteindelijk industrieel inzetbaar zijn, zal de tijd leren. Mogelijkheden om repetitieve en vervelende taken door beide uit te laten voeren zullen er natuurlijk altijd zijn.
Thema
Nu is ‘digitalisering’ bij Festo al sinds jaar en dag een thema. De Motion Terminal met zijn universele ventielen en ‘motion apps’ is al genoemd. De CPX IoT Gateway die de Motion Terminal en componenten uit de CPX-reeks met de (Festo-)cloud verbindt is een andere. Wie op het vorig jaar mede door Constructeur georganiseerde Food&Beverage-event aanwezig was heeft ook gezien hoe Festo met een speciale energiebesparingsmodule MSE6-E2M en de gateway live het energieverbruik op een productielijn van Ben & Jerry’s via de cloud op een dashboard wist te visualiseren.
Beïnvloeden
De data uit een dergelijk proces gekoppeld aan eventuele sensordata van machines, kunnen met behulp van kunstmatige intelligentie worden geanalyseerd. Op basis daarvan en op basis van de effecten van interventies uit het verleden kan dan een actie worden afgeleid. Daar wordt ongetwijfeld aan gewerkt. Zeker ook gezien de uitspraak van Frank Melzer, lid van de raad van bestuur voor product- en technologiemanagement: "De onderwerpen analyse en kunstmatige intelligentie zullen onze productportfolio in de toekomst enorm beïnvloeden." Als de data het toelaten, kan dat met intelligente algoritmes die op afzonderlijke componenten draaien. Worden de datavolumes groter dan kunnen de gegevens nog steeds ‘on premise’ worden geanalyseerd als je daar de capaciteit voor hebt. Heb je die capaciteit niet dan zijn data-analyse en -opslag in de (Festo-)cloud bij uitstek de oplossingen, meent de topman.
Platworm
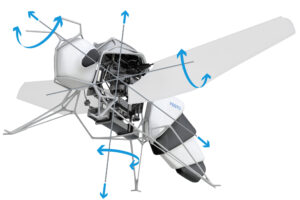
 De BionicFinWave is een studie naar autonome robotprincipes voor bijvoorbeeld pijpleidinginspectie in de procesindustrie.
De BionicFinWave is een studie naar autonome robotprincipes voor bijvoorbeeld pijpleidinginspectie in de procesindustrie.
De jaarlijks toevoeging aan de Festo-zoo die dit jaar op de Hannover Messe werd getoond is al even bekend. Wat heet – de vorige editie was net achter de rug of de jongste aanwinst zwom rond op internet: de BionicFinWave. Bij de bionische platworm is het vooral de wijze van voortstuwing die de onderzoekers van Festo intrigeerde en ook door de sepia – toch wel ‘aaibaarder’ dan een platworm – wordt gebruikt om zich voort te bewegen. Hierbij wordt gebruikgemaakt van vinnen van voor tot achter aan weerszijden aan het lijf van de dieren. Door opeenvolgende golfbewegingen wordt water hetzij naar achter of voor gestuwd en kunnen de dieren voor- en achteruit zwemmen. En dat kan de FinWave dus ook. De siliconen vinnen worden bewogen door middel van servomotoren die twee onafhankelijke nokkenassen aandrijven. Aan de nokkenassen zijn hefboompjes bevestigd die weer aan de vinnen vastzitten. Zoals alle Bionic-projecten zit ook hier een gedachte achter: bestudering van autonome robotprincipes die bijvoorbeeld voor inspectie van pijpleidingsystemen in de procesindustrie kunnen worden gebruikt. Oriëntatie en richtingbepaling heeft plaats met behulp van ultrasoon geluid.
Anderen lazen ook