
17 feb. 1999
2 minuten
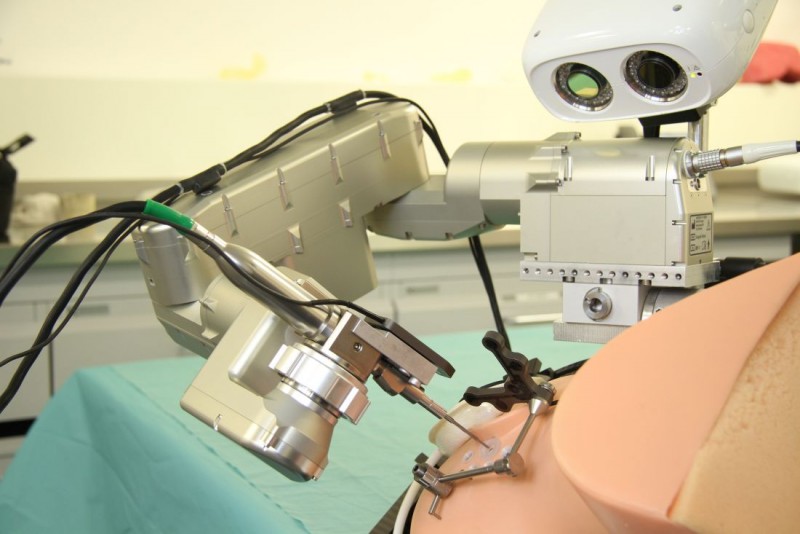
Chirurgen en ingenieurs van het Inselspital in Bern en van het Artorg Center for Biomedical Engineering Research van de Universität Bern hebben gezamenlijk een nauwkeurige operatierobot ontwikkeld. voor de plaatsing van een cochleair implantaat. Dit is een apparaatje dat dove of slechthorende mensen hun gehoor gedeeltelijk kan teruggeven. Het implantaat neemt de functies van beschadigde cellen in het binnenoor over, waar een hoortoestel geluiden harder maakt.
Om een cochleair implantaat in het oor van een dove patiënt in te brengen, moet een keel-, neus- en oorchirurg achter de oorschelp met de hand een zeer exacte toegang door de schedelbeenderen tot in het binnenoor maken.
Enerzijds moet voldoende bot worden verwijderd om het noodzakelijke zicht op het binnenoor te garanderen, anderzijds moeten verwondingen van de door de botten lopende zenuwen worden voorkomen. De implantaat-elektrode wordt daarna in het slakkenhuis (Cochlea) ingebracht en maakt het mogelijk dat patiënten horen.
Instrumenten leiden chirurg naar slakkenhuis
Doel van het onderzoeksproject in Bern was om te onderzoeken of nieuwe soorten door computers en robots ondersteunde benaderingen tot een beter en reproduceerbaar resultaat van een operatie kunnen bijdragen.
Eerst wordt aan de hand van computer tomografie beelden van de patiënt een tunnel van achter het oor tot direct in het slakkenhuis gedefinieerd. De doorsnede van deze tunnel bedraagt bij de ingang 2,5 m, in het slakkenhuis nog 1,8 mm. Hij voert direct tussen de gezichtszenuw en de smaakzenuw door. De implantaatelektrode kan daardoor in een gedefinieerde ingangshoek in het slakkenhuis worden ingevoerd.
Om de geplande te volgen weg kan dan tijdens de operatie met een robot worden geboord. Door de nauwe ruimte in de schedel en het binnenoor moet de robot op enkele tienden van een millimeter nauwkeurig kunnen boren. Voor de chirurgen is er geen directe visuele controlemogelijkheid.
Drievoudige veiligheid
Om tijdens het boren de nodige veiligheid te garanderen, zijn daarom toegesneden en van elkaar onafhankelijke veiligheidsmechanismen noodzakelijk. Het proces is te vergelijken met het instrumentvliegen van een modern vliegtuig, dat ook bij slecht zicht een veilige vlucht garandeert.
In het robotsysteem grijpen hiertoe drie veiligheidssystemen in elkaar. Een nauwkeurig robotsysteem meet de positie van robot en patiënt en stuurt daarmee de robotbewegingen aan. Via een krachtmeetsysteem worden de boorkrachten gemeten en vergeleken met de te verwachten botsterkte. Bovendien zendt een zenuwstimulatiesysteem zwakke elektrische pulsen in het bot en meet de ontstane terugkoppelingen. Alleen uit alle informatie samen kunnen de chirurgen afleiden of de robot de geplande weg volgt.
Multidisciplinair team
De eerste door een robot ondersteunde plaatsing van een cochleair implantaat is het resultaat van een decennium interdisciplinair onderzoek door ingenieurs, chirurgen, neuroradiologen, neurologen en audiologen. De technologie doorliep na ontwikkeling een aantal preklinische testfases om de systemen vóór hun invoering in de operatiekamer te testen. De laatste stap in de kliniek is een succesvol voorbeeld van de vertaling van onderzoekswerk.
bron: Universität Bern
Anderen lazen ook


