17 feb. 1999
2 minuten
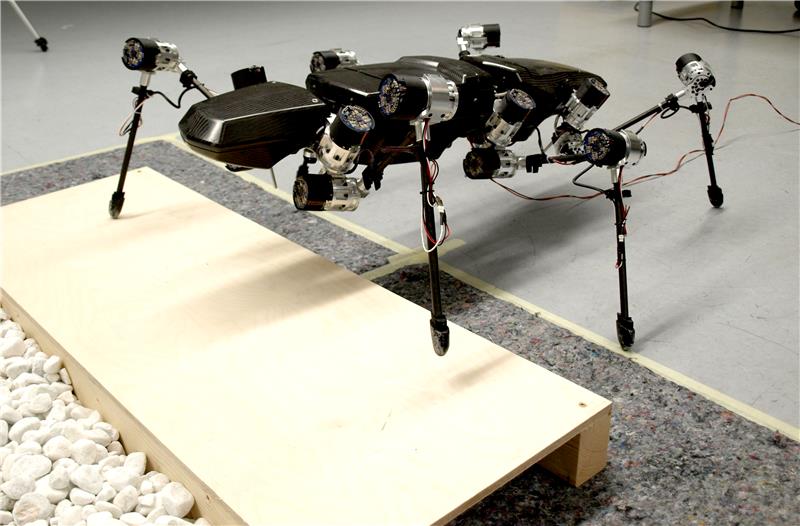
Onderzoekers aan de Bielefeld universiteit in Duitsland hebben een zespotige looprobot ontwikkeld. De inspiratie voor het apparaat kregen ze van een wandelende tak.
De robot heet Hector en heeft net als het insect waarop hij is geïnspireerd zes poten en een ultralicht uitwendig skelet. Uniek aan de robot is dat het apparaat is uitgerust met een groot aantal sensoren en dat het functioneert dankzij een decentraal aanstuurconcept: Walknet.
Hector
De looprobot is gebouwd door de Biomechatronics-onderzoeksgroep. In de toekomst kan Hector dienen als aan testplatform voor biologen en robotica-specialisten om dierlijke voortbeweging te testen. Een grote verzameling van data van sensoren zal er in de toekomst voor zorgen dat de robot nog autonomer kan bewegen. Een ander belangrijk puzzelstuk is het optimaal coördineren van bewegingen van een robot met elastische aandrijvingen.
"De manier waarop elasticiteit in Hector’s aandrijvingen werkt is vergelijkbaar met de manier waarop spieren werken in biologische systemen", aldus Prof. Dr. Axel Schneider. Hij leidt de onderzoeksgroep aan de universiteit en werkt nauw samen met Prof. Dr. Volker Dürr van de afdeling biologische cybernetica van de biologiefaculteit van de Bielefeld-universiteit.
Elastische aandrijftechniek
Schneider en zijn team ontwikkelden de elastische aandrijftechniek in de gewrichten van de robot zelf. Hector heeft 18 van zulke gewrichten. Door de biologisch-geïnspireerde elasticiteit kan Hector zich aanpassen aan de eigenschappen van de ondergrond waarover hij loopt.
"Elasticiteit op zichzelf is alleen niet genoeg om Hector door een natuurlijke omgeving met obstakels te laten lopen", zegt Schneider. "De uitdaging was om een aansturingssysteem te ontwikkelen dat ook zorgde voor de coördinatie van de bewegingen van de benen in moeilijke omgevingen." Een collega van Schneider: Jan Paskarbeit, was verantwoordelijk voor de ontwikkeling en bouw van de robot. Hij programmeerde ook een virtuele versie van Hector om experimentele aansturingsoplossingen te testen zonder de robot te beschadigen.
"Alle subsystemen moeten met elkaar communiceren als de robot zonder problemen moet kunnen lopen", zegt Paskarbeit. "Anders heeft Hector bijvoorbeeld teveel benen tegelijkertijd in de lucht, waardoor hij instabiel wordt en gaat vallen. Ook moeten de benen kunnen reageren op botsingen met obstakels. Dit hebben we aangepakt door een reflexgedraging te implementeren voor het klimmen over objecten."
Anderen lazen ook