17 feb. 1999
3 minuten

Wetenschappers hebben een ontwerp- en fabricagetool gemaakt voor zachte pneumatische actuators voor geïntegreerde detectie. Dit soort actuatoren is een cruciale ruggengraat in toepassingen als ondersteunende wearables, robotica en revalidatietechnologieën.
De kleine dynamische apparaten hebben voordelen zoals hoge responspercentages en vermogen-naar-ingangsverhoudingen. Maar ze zijn niet gemakkelijk te maken. Tot nu toe vragen ze een handmatig ontwerp- en fabricageproces, wat zich vertaalt in veel vallen en opstaan om daadwerkelijk te testen en te zien of de ontwerpen zullen werken.
Wetenschappers van MIT’s Computer Science and Artificial Intelligence Laboratory (CSail) bedachten een schaalbaar proces voor het computationeel ontwerpen en digitaal fabriceren van zachte pneumatische actuators: PneuAct.
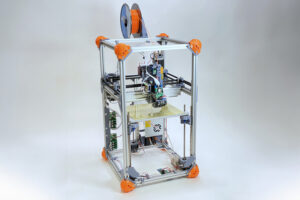
PneuAct maakt gebruik van een breimachine. Een menselijke ontwerper specificeert de steken en het patroon van de sensoren in de software en programmeert zo hoe de actuator zal bewegen. Het resultaat kan vervolgens worden gesimuleerd voordat het echt wordt gedprint. Het stuk textiel wordt gefabriceerd door de breimachine, die kan worden bevestigd aan een goedkope, kant-en-klare rubberen siliconenbuis om de actuator te voltooien.
De gebreide actuator bevat geleidend garen voor detectie, waardoor de actuatoren kunnen ‘voelen’ wat ze aanraken. Het team maakte verschillende prototypes: een ondersteunende handschoen, een zachte hand, een interactieve robot en een pneumatische viervoeter. De apparaten waren verpakt in een zachte, gele stof waardoor ze een beetje op bananenvingers leken.
Hoewel er in de loop der jaren veel beweging is geweest in de hardware-ontwikkeling van zachte pneumatische aandrijvingen, zijn de ontwerptools niet zo snel verbeterd. Bij oude processen werden meestal polymeren en gieten gebruikt. De CSail-wetenschappers gebruikten een combinatie van elastische en sensorische steken (met geleidend garen), waarmee het buigen van de apparaten kan worden geprogrammeerd, en de mogelijkheid om feedback uit de echte wereld op te nemen.
Het team gebruikte de actuatoren bijvoorbeeld om een robot te bouwen die voelde wanneer hij specifiek door mensenhanden werd aangeraakt, en op die aanraking reageerde.
De handschoen kan door een mens worden gedragen als aanvulling op de beweging van de vingerspieren, waardoor de hoeveelheid spieractiviteit wordt geminimaliseerd die nodig is om taken en bewegingen uit te voeren. Dit heeft potentieel voor mensen met letsel, beperkte mobiliteit of ander trauma aan de vingers. De methode kan ook worden gebruikt om een exoskelet te maken; daarvoor maakten de onderzoekers een sleeve die dragers kan helpen hun elleboog, knie of andere lichaamsdelen te buigen.
"Digitaal machinaal breien, een veelgebruikte productiemethode in de hedendaagse textielindustrie, maakt het mogelijk om een ontwerp in één keer te ‘printen’, waardoor het veel schaalbaarder wordt", zegt Yiyue Luo, hoofdauteur van het artikel over het onderzoek. "Zachte pneumatische aandrijvingen zijn intrinsiek buigzaam en flexibel, en in combinatie met intelligente materialen zijn ze een noodzakelijke kracht geworden in veel robots en ondersteunende technologieën. Snelle fabricage, met onze ontwerptool, kan hopelijk het gemak en de alomtegenwoordigheid vergroten."
Sensoren begrijpen
Eén type detectie dat het team gebruikte, werd ‘resistieve drukdetectie’ genoemd, waarbij de actuator druk ‘stuurt’. Bij het fabriceren van een robotgrijper zou hij proberen iets vast te grijpen, en de druksensor zou voelen hoeveel kracht er op het object werd uitgeoefend, en dan zou hij proberen te zien of de greep succesvol was of niet. Het andere type is ‘capacitive sensing’, waarbij de sensor informatie ontvangt over de materialen waarmee de actuator in contact komt.
De actuatoren zijn stevig – er is geen garen beschadigd tijdens het proces. Een beperking van het systeem is dat alleen buisvormige actuatoren gemakkelijk verkrijgbaar zijn. Een logische volgende stap is dat u doelhoudingen en optimale steekpatronen kunt specificeren die automatisch kunnen worden gesynthetiseerd.
"Onze softwaretool is snel, gebruiksvriendelijk en geeft een nauwkeurig voorbeeld van de ontwerpen van gebruikers, zodat ze snel virtueel kunnen herhalen terwijl ze maar één keer hoeven te fabriceren. Maar dit proces vereist nog steeds wat vallen en opstaan van mensen. Kan een computer redeneren over hoe textiel fysiek moet worden geprogrammeerd in actuatoren om rijk, op waarnemingen gebaseerd gedrag mogelijk te maken? Dat is de volgende grens", zegt Andrew Spielberg, postdoc in materiaalkunde en werktuigbouwkunde aan de Harvard University, een andere auteur van de krant.
Anderen lazen ook