
PicoGK is gebruikt om een volledig nieuwe elektrische motor te laten ontwerpen door AI, die vervolgens geheel wordt ge-3D-print. Is dit de toekomst van motordesign? Met dank aan YouTubekanaal Tech Pla[…]
Meer…
In
PicoGK is gebruikt om een volledig nieuwe elektrische motor te laten ontwerpen door AI, die vervolgens geheel wordt ge-3D-print. Is dit de toekomst van motordesign? Met dank aan YouTubekanaal Tech Pla[…]
Meer…
Er is weer een nieuwe onzichtbaarheidsmantel. Deze maakt gebruik van lenzen . De Britse uitvinder Tristan Thompson gooit op Kickstarter hoge ogen met zijn scherm. Wie ook onzichtbaar wil worden, kan e[…]
Meer…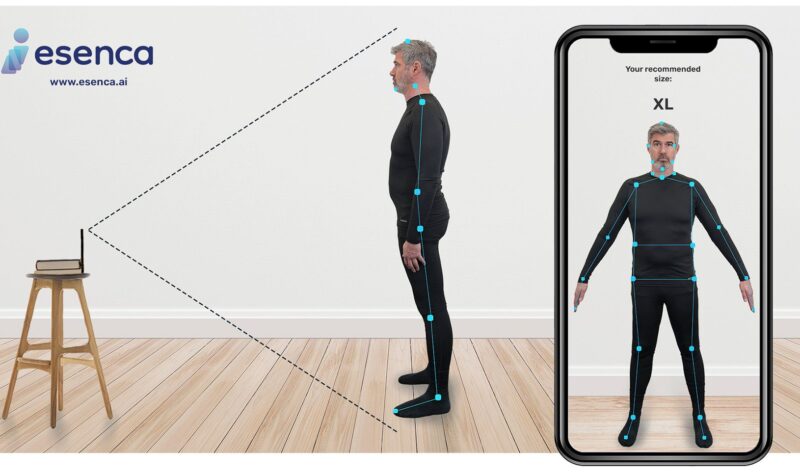
Mewa kan je binnenkort werk- en veiligheidskleding aanmeten zonder dat je hoeft te passen. Dit dankzij de AI-technologie van een Roemeense start-up. De technologie biedt de mogelijkheid om via een app[…]
Meer…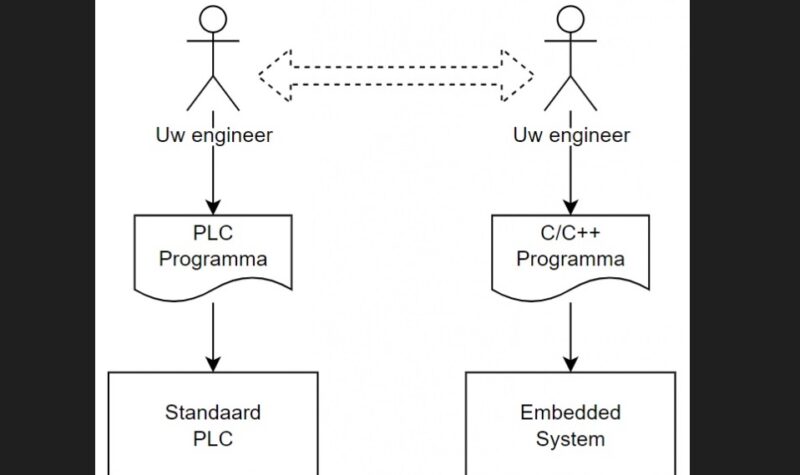
Traditioneel wordt de besturing van een apparaat met een PLC opgebouwd. Dat werkt uitstekend omdat bij een prototype en kleine series flexibiliteit belangrijker is dan de kosten. Wordt het apparaat da[…]
Meer…
Op 1 mei 2024 opent een vernieuwde subsidie voor onderzoek naar de haalbaarheid van innovaties die de CO2-uitstoot in de Nederlandse industrie helpen verminderen. Er is meer geld beschikbaar, bedrijve[…]
Meer…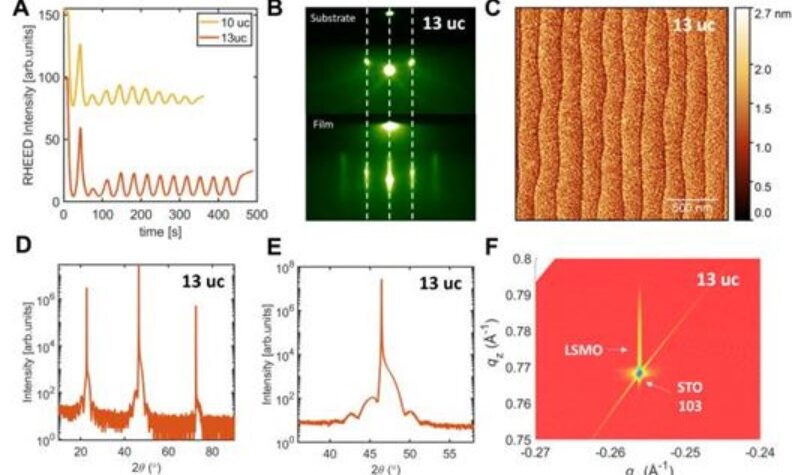
Onderzoekers van de Universiteit Twente hebben aangetoond hoe de efficiëntie van waterstofproductie verbeterd kan in een experimentele opstelling. Ze lieten daarbij zien dat de magnetische volgorde […]
Meer…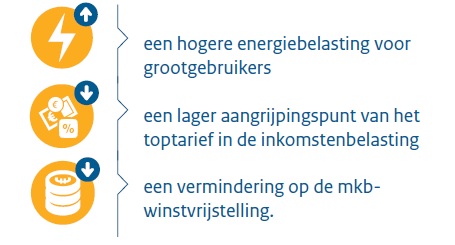
‘Voor grote elektriciteitsverbruikers is het goed nieuws dat het kabinet de Indirecte Kosten Compensatie (IKC) in 2024 met 186 miljoen euro herstelt’, aldus FME in een reactie op de voorja[…]
Meer…
De norm ‘ISO 14122: Safety of machinery – permanent means of access to machinery’ wordt herzien. De herziening biedt kans om deze norm, die in 2016 is gepubliceerd, aan te laten sluiten […]
Meer…
Nog tot eind van de week kan je op het beursterrein in Düsseldorf terecht voor alles rondom de engineering, productie en bewerking van buizen & pijpen op Tube 2024. Voor de productie van draad &a[…]
Meer…
Deep Robotics heeft een vriendje gemaakt voor robothond Spot – en wel een die altijd op zijn pootjes terecht komt:[…]
Meer…