17 feb. 1999
2 minuten
Hoe kunnen mensen direct de gladheid van een oppervlak inschatten en hun greep aanpassen, bijvoorbeeld als ze een nat glas oppakken? Middels een (radiale) uitrekking van de huid van de vingertop bij de waarneming van gladheid tijdens het eerste contact. Dit is nuttige informatie voor de robotica, bijvoorbeeld om prothesen en grijpers te verbeteren.
"Mensen zijn er opmerkelijk goed in om heel secuur allerlei voorwerpen te hanteren, ongeacht hoe kwetsbaar, zwaar of glad die zijn. We pakken probleemloos een glas water op, of dit nu leeg, vol, droog of nat is", aldus onderzoeker en eerste auteur Laurence Willemet en hoofdonderzoeker Michaël Wiertlewski van de TU Delft, die met collega’s van Neuroscience Research Australia en UNSW Sydney aan dit onderzoek hebben gewerkt. Om de juiste grijpkrachten toe te passen schat ons zenuwstelsel de gladheid van het oppervlak van een object in. We passen een grotere grijpkracht toe als het oppervlak van gladde zijde is gemaakt, en een kleinere bij schuurpapier, omdat dat een betere grip biedt. "Deze informatie is beschikbaar zodra we een voorwerp voor het eerst aanraken. Het is al eerder aangetoond dat er slechts honderd milliseconden contact met een oppervlak nodig is om krachten in de vingertoppen aan te passen aan de wrijving."
Mysterie
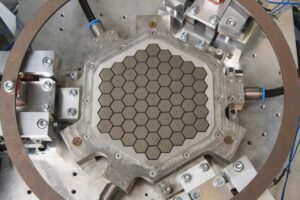
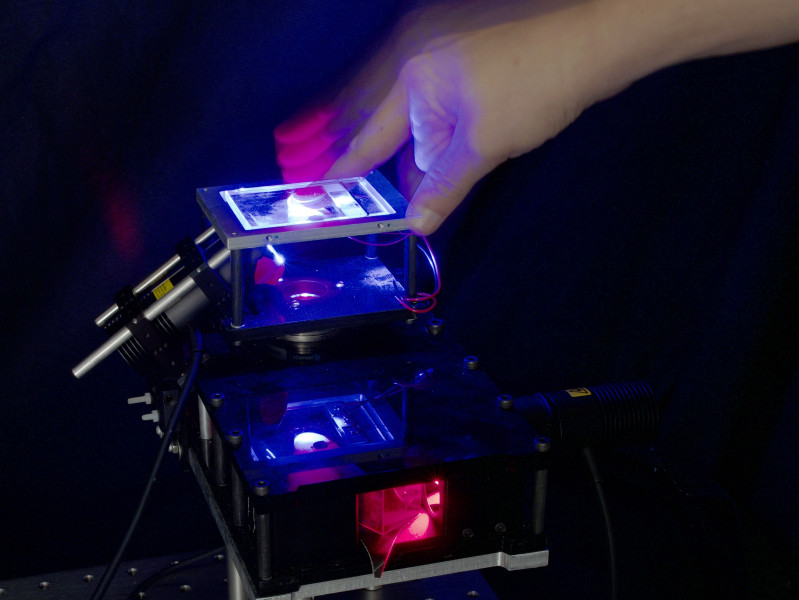
Maar hoe wrijving alleen door de huidvervorming van de vingertop kan worden ingeschat zonder dat deze wegglijden, wordt nog niet begrepen. Noch in de neurowetenschappen noch in technische vakgebieden. "Daarom hebben wij een wrijvings-modulatieapparaat ontwikkeld waarmee we bestuderen welke effecten de wrijvingseigenschappen van voorwerpen tijdens het eerste contact op mensen hebben", zegt Willemet.
De onderzoekers vroegen deelnemers om op een glasplaat te drukken en de wrijvingsweerstand ervan te schatten. De wrijvingsweerstand van de plaat tegen de huid werd door ultrasone smering gereguleerd, zodat de omgevingsomstandigheden ongewijzigd bleven. Zo konden de wetenschappers verband leggen tussen huidvervorming en hoe goed de deelnemer wrijving kon waarnemen. "We tonen aan dat er sprake is van een (radiale) uitrekking van de huid van de vingertop bij de waarneming van gladheid tijdens het eerste contact."
Robotica
Op een verfijnde manier grijpen is een grote uitdaging in de robotica en bij bediening op afstand. Volgens Willemet kunnen de bevindingen van dit onderzoek de haptische mens-machine-interactie verbeteren en kunnen ze worden gebruikt bij het ontwerp van geavanceerde tactiele sensoren voor robotica of protheses.
Anderen lazen ook