
17 feb. 1999
5 minuten

Bij een gaslek in een groot gebouw of op een industrieterrein moeten brandweerlieden nu nog naar binnen met gasdetectie-instrumenten. Het kan geruime tijd duren voordat ze het gaslek vinden en ze riskeren hierbij soms hun leven. Onderzoekers van de TU Delft, de Universiteit van Barcelona en Harvard University hebben nu een zwerm kleine drones ontwikkeld die autonoom gasbronnen kunnen detecteren en lokaliseren in onoverzichtelijke binnenruimten.
Het wetenschappelijk artikel is gepubliceerd op de artikelenserver van ArXiv en wordt later dit jaar gepresenteerd op de IROS-roboticaconferentie.
De kunstmatige intelligentie voor deze complexe taak vormde de belangrijkste uitdaging voor de onderzoekers, aangezien het rekenvermogen en geheugen van de kleine drones zeer beperkt waren. Ze losten dit probleem op door middel van op de natuur geïnspireerde navigatie- en zoekstrategieën.
Het onderzoek vormt een belangrijke stap in de ontwikkeling van intelligentie van kleine robots. Het praktisch belang is groot, want gaslekken kunnen hiermee efficiënter worden gevonden zonder dat mensen hun leven op het spel hoeven te zetten.
Lokalisatie gaslek is lastig
Autonome lokalisatie van gasbronnen is een complexe taak. Kunstmatige gassensoren zijn minder goed dan dierenneuzen in staat om kleine hoeveelheden gas te detecteren en te reageren op snelle veranderingen in de gasconcentratie. Bovendien kan de omgeving waarin het gas zich verspreidt complex zijn. Veel van het onderzoek op dit gebied heeft zich dan ook gericht op zelfstandige robots die naar een gasbron zoeken in vrij kleine omgevingen zonder obstakels, waarin de bron gemakkelijker te vinden is.
Een zwerm kleine drones gaat een gebouw binnen op zoek naar een gaslek. Het onderzoeksteam heeft commercieel verkrijgbare CrazyFlie-drones gebruikt, die een diameter van 12 cm hebben en slechts ongeveer 37.5 gram wegen.
Zwermen kleine drones
"We zijn ervan overtuigd dat werken met een zwerm kleine drones een veelbelovende aanpak is voor autonome lokalisatie van gasbronnen", zegt Guido de Croon, hoogleraar bij het Micro Air Vehicle laboratory van de TU Delft. "Door de geringe omvang van de drones zijn ze zeer veilig voor mensen en spullen die zich eventueel nog in het gebouw bevinden, en omdat ze zich vliegend voortbewegen, zullen ze uiteindelijk in drie dimensies naar de bron kunnen zoeken. Bovendien zijn ze door hun kleine formaat ook bruikbaar in kleine binnenruimtes. En een gasbron kan sneller worden gelokaliseerd omdat er met een zwerm drones wordt gewerkt, en ze zich in hun zoektocht naar de echte bron niet laten foppen door lokale maxima van de gasconcentratie."
Omdat de drones zo klein zijn, is het anderzijds wel heel moeilijk om ze van de kunstmatige intelligentie te voorzien die noodzakelijk is voor autonome lokalisatie van een gasbron. De sensoren en rekenkracht aan boord van de drones zijn uiterst beperkt, en niet geschikt voor het type AI-algoritme waardoor auto’s autonoom kunnen rijden. Bovendien brengt het opereren in een zwerm zijn eigen uitdagingen met zich mee, aangezien de drones elkaar moeten opmerken om botsingen te vermijden en samen te werken.
Kunstmatige intelligentie geïnspireerd op de natuur
"In de natuur zijn er allerlei voorbeelden van succesvolle navigatie en lokalisatie van geurbronnen met zeer beperkte middelen", aldus Bart Duisterhof, die aan het onderzoek gewerkt heeft in het kader van zijn masterscriptie aan de TU Delft. "Denk maar aan fruitvliegjes, die ‘s zomers met hun kleine hersentjes van zo’n 100.000 neuronen onfeilbaar de bananen in je keuken weten te vinden. Ze doen dit door handig eenvoudige acties te combineren, zoals tegen de luchtstroom in vliegen, of juist loodrecht op de luchtstroom, afhankelijk van of ze de geur wel of niet ruiken. Omdat we op onze robots geen luchtstroomsensoren hebben, konden we dit gedrag niet direct kopiëren, maar we hebben onze robots wel vergelijkbaar eenvoudig gedrag bijgebracht om hun taak te volbrengen."
De kleine drones beschikken voor hun navigatie over een nieuw ‘insectenalgoritme’, genaamd ‘Sniffy Bug’. Zolang er nog geen drone gas heeft geroken, verspreiden de drones zich zoveel mogelijk over de omgeving, terwijl ze obstakels en elkaar ontwijken. Als een van de drones gas detecteert, geeft hij dit door aan de anderen. Vanaf dat moment gaan de drones met elkaar samenwerken om zo snel mogelijk de gasbron te vinden. De zwerm zoekt dan de maximale gasconcentratie met een algoritme genaamd ‘particle swarm optimization’ (PSO), waarbij elke drone fungeert als een ‘deeltje’. Oorspronkelijk was dit algoritme gemodelleerd naar het sociale gedrag en de bewegingen van vogelzwermen. Elke drone beweegt op basis van de locatie waar hij zelf de hoogste gasconcentratie waarneemt, de locatie waar de zwerm de hoogste concentratie waarneemt, en een momentum om in dezelfde richting te blijven bewegen. Het voordeel van deze zoekstrategie is dat alleen de gasconcentratie gemeten hoeft te worden, en niet de gasconcentratiegradiënt of de richting van de luchtstroom. Bovendien zorgt het algoritme ervoor dat de zwerm lokale maxima kan negeren die in complexe omgevingen kunnen optreden.
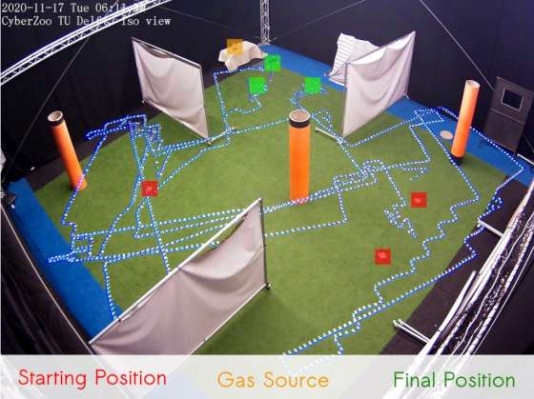 Time-lapseafbeelding van een van de experimenten. De rode vierkanten zijn de startpunten van de drones, die waren uitgerust met blauwe lichtjes. Het gele vierkant is de locatie van de gasbron. De groene vierkantjes zijn de eindposities van de drones. De blauw-witte stippen geven de plaats weer van de drones zoals ze op achtereenvolgende momenten door de camera zijn vastgelegd.
Time-lapseafbeelding van een van de experimenten. De rode vierkanten zijn de startpunten van de drones, die waren uitgerust met blauwe lichtjes. Het gele vierkant is de locatie van de gasbron. De groene vierkantjes zijn de eindposities van de drones. De blauw-witte stippen geven de plaats weer van de drones zoals ze op achtereenvolgende momenten door de camera zijn vastgelegd.
Praktische toepassingen
"Dit onderzoek toont aan dat zwermen kleine drones zeer complexe taken kunnen uitvoeren", zegt De Croon. "We hopen dat dit onderzoek een inspiratie vormt voor andere roboticaonderzoekers om te heroverwegen welk type AI nodig is voor autonoom vliegen."
Er is meer werk nodig om dit type technologie verder te ontwikkelen tot een volledig werkend product. De onderzoekers hebben zich bijvoorbeeld nog niet beziggehouden met driedimensionaal bewegen om gasbronnen op variabele hoogte te lokaliseren. Verder moet ook de betrouwbaarheid van de navigatie worden verbeterd voordat de drones kunnen worden ingezet in een echt noodscenario.
Het reeds ontwikkelde algoritmen zijn niet alleen bruikbaar voor het opsporen van gaslekken in gebouwen, maar ook voor wetenschappelijke missies zoals het opsporen van methaan op Mars, of zakelijke toepassingen zoals het vroegtijdig opsporen van ziekten of plagen in kassen.
Anderen lazen ook


