17 feb. 1999
3 minuten
De afgelopen vijf jaar hebben MIT’s Computer Science and Artificial Intelligence Laboratory (CSailL) en het Senseable City Lab gewerkt aan een vloot van autonome boten die in Amsterdam kunnen worden ingezet. Vorig jaar zagen we de autonome Roboats die zichzelf kunnen assembleren tot een reeks drijvende constructies voor verschillende doeleinden. Sinds deze week doorkruist Roboat II de grachten.
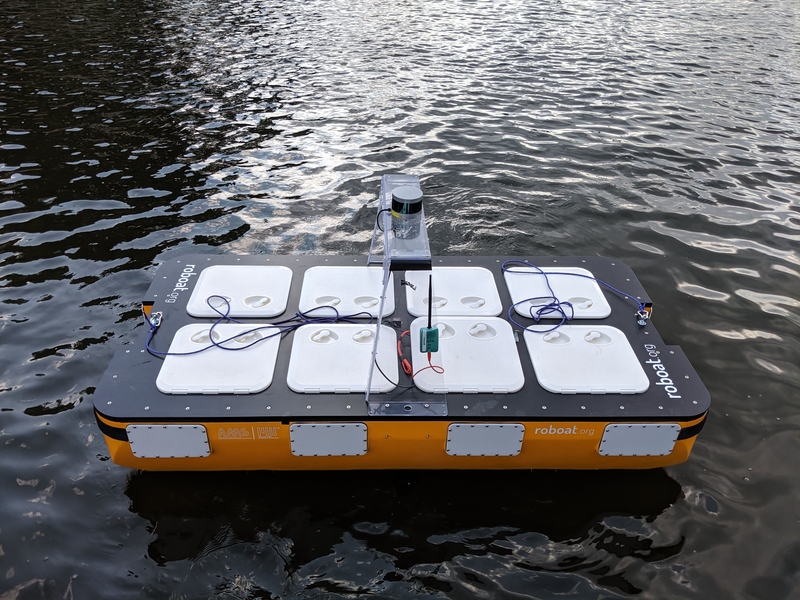
Het nieuwe is dat deze passagiers kan vervoeren. De boot is twee meter lang en kan twee passagiers ‘Corona-veilig’ door de grachten van Amsterdam vervoeren. Roboat II heeft vier propellors zodat hij in elke richting kan bewegen, en bevat Lidar, GPS en inertial sensoren om hem te helpen navigeren. Hoewel een individuele boot er vrij klein uitziet, zijn ze modulair, net als de originele Roboat. Dit betekent dat ze zichzelf kunnen samenstellen tot een groter schip dat wordt bestuurd door een hoofdboot.
Roboat II vaart al behoorlijk effectief door Amsterdam: na een drie uur durende autonome eerste tocht oor de grachten om gegevens te verzamelen, keerde hij en op het beginpunt terug met een foutmarge van 17 centimeter.
"Bestaande algoritmen hoeven zelden rekening te houden met dynamische systemen op het water", zegt Carlo Ratti, directeur van Senseable City Lab. "Coöperatief transport, met een serie watervoertuigen, brengt unieke uitdagingen met zich mee die je niet tegenkomt bij lucht- of grondvoertuigen. Traagheid en belasting van de voertuigen worden bijvoorbeeld belangrijkere factoren die het systeem moeilijker te besturen maken."
Roboat II heeft een nieuw algoritme voor Simultaneous Localization and Mapping (Slam), een model-based optimal controller die ‘niet-lineaire modelvoorspellende controller’ wordt genoemd, en de ‘moving horizon estimation’.
Het werkt als volgt: wanneer een passagier moet worden opgepikt, wijst de systeemcoördinator de taak toe aan een onbezette boot die zich het dichtst bij de passagier bevindt. Terwijl Roboat II de passagier ophaalt, creëert hij een model van een haalbaar pad naar de gewenste bestemming, op basis van de huidige verkeersomstandigheden. Vervolgens zal Roboat II, die 50 kilogram weegt, zichzelf gaan lokaliseren door het Slam-algoritme uit te voeren en lidar- en GPS-sensoren te gebruiken, evenals een inertial meeteenheid voor lokalisatie, positie en snelheid. De controller volgt vervolgens de referentietrajecten van de planner, die het pad bijwerkt om gedetecteerde obstakels te vermijden om mogelijke botsingen te voorkomen.
Het team merkt op dat de verbeteringen in hun besturingsalgoritmen de obstakels sinds hun laatste update minder als een gigantische ijsberg hebben laten voelen; Het Slam-algoritme biedt een hogere lokalisatienauwkeurigheid voor Roboat en maakt online kaarten mogelijk tijdens navigatie, wat ze niet hadden in eerdere iteraties.
De onderzoekers beschouwen de originele Roboat als een ‘kwartschaal’ -optie, waarbij de Roboat II de halve schaal vertegenwoordigt; ze werken langzaam toe naar het punt van een volledige optie die vier tot zes passagiers kan vervoeren. Die grotere versie is al in aanbouw in Amsterdam, maar het is niet bekend wanneer hij klaar is om te testen.
In de toekomst verwacht het team de algoritmen van de Roboat te blijven verbeteren om het beter te maken met de uitdagingen die een boot kan tegenkomen, zoals verstoringen door stroming en golven. Ze werken er ook aan om het beter in staat te stellen objecten die het tegenkomt te identificeren en te ‘begrijpen ‘, zodat het beter kan omgaan met de omgeving waarin het zich bevindt. Alles wat de Roboat II op halve schaal leert, wordt natuurlijk toegepast op de volledige versie die waar nu aan wordt gewerkt. Ze hebben nog geen idee wanneer we die grotere Roboat in het water kunnen zien.
Anderen lazen ook