20 jun. 2018
4 minuten
Engineers aan het Massachusetts Institute Of Technology hebben ‘zachte’ 3D-geprinte structuren ontwikkeld waarvan de bewegingen kunnen worden bestuurd met een magneet.
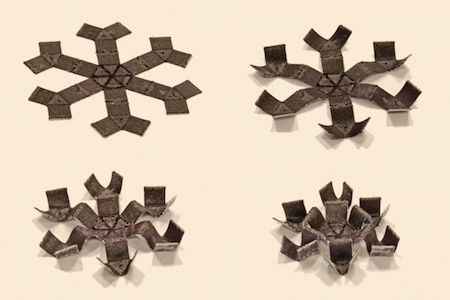
Het magnetisch te manipuleren areaal bestaat uit onder andere een gladde ring die kreukelt, een lage pijp die dichtknijpt, een vel dat zichzelf opvouwt en een spinachtige grijper die kan kruipen, rollen, springen en snel genoeg kan sluiten om een bewegende bal te pakken. De grijper kan zich ook rondom een pil plooien en deze vervolgens verplaatsen.
Magnetische ‘3D-inkt’
De onderzoekers hebben elke structuur gemaakt van een nieuw type 3D-printbare inkt die magnetische deeltjes bevat. Door een elektromagneet om de nozzle van een 3D-printer te monteren, worden de deeltjes in een enkele richting te bewogen. Door nu de magnetische oriëntatie van individuele secties van de structuur te controleren, kunnen de onderzoekers structuren en apparaten maken, die vrijwel onmiddellijk kunnen veranderen in complexe formaties. En zich zelfs kunnen voortbewegen terwijl de verschillende secties reageren op een extern magnetisch veld.
Biomedische toepassingen
Xuanhe Zhao, the Noyce Career Development-professor aan het Department of Mechanical Engineering en het Department of Civil and Environmental Engineering, zegt dat de techniek kan worden gebruikt om magnetisch biomedische apparaten te besturen: “We denken dat in de biomedicijnen deze techniek veelbelovende oplossingen kan leveren. We kunnen bijvoorbeeld een structuur rondom een bloedvat plaatsen om het pompen van het bloed te besturen. Of een magneet gebruiken om een apparaat door het maagdarmkanaal leiden, weefselpuncties uitvoeren, een blokkade verhelpen of bepaalde medicijnen heel gericht afleveren. Je kan ontwerpen, simuleren en dan gewoon printen om de verschillende functies te krijgen.”
‘Shape-shifters’
De ontwikkeling valt in de categorie ‘soft actuated devices’, sponsachtige, kneedbare materialen die zijn ontworpen om van vorm te veranderen of voort te bewegen onder invloed van een scala aan mechanische middelen. Zo zwellen hydrogels op wanneer de temperatuur of zuurgraad verandert, vormgeheugenpolymeren en vloeibaarkristal-elastomeren vervormen onder invloed van warmte of licht, pneumatische en hydraulische actuatoren kunnen worden door er lucht of water in te pompen, en diëlektrische elastomeren rekken uit onder invloed van elektrische spanning.
‘Soft’ robots
Maar hydrogels, vormgeheugenpolymeren en vloeibaarkristal-elastomeren reageren traag en de vormveranderingen kunnen minuten of uren in beslagnemen duren. Water- en luchtbekrachtigde apparaten hebben slangen nodig die ze met een pomp verbindt, zodat ze onhandig zijn in op afstand bestuurbare toepassingen. Diëlektrische elastomeren vragen over het algemeen spanningen boven de 1000 V. “Er is geen enkele kandidaat voor toepassing in een ‘soft’ robot die in de afgesloten ruimte van het menselijk lichaam draadloos zijn werk kan doen", zegt collega Yoonho Kim. "Daarom denken we dat magnetische bekrachtiging veelbelovend is want het is snel, krachtig, lichaamsvriendelijk en kan op afstand worden bestuurd.”
Domeinen
Andere groepen hebben magnetisch bekrachtigde materialen ontwikkeld. Maar die hebben alleen maar relatief simpele bewegingen opgeleverd. Meestal hebben onderzoekers een polymeeroplossing gemixt met magnetische pareltjes en dat in een vorm gegoten. Als het materiaal is uitgehard worden de pareltjes met een magnetisch uniform gemagnetiseerd, alvorens het uit de vorm wordt gehaald. ”Er zijn alleen structuren gemaakt die verlengen, krimpen of buigen zegt mede-onderzoeker Hyunwoo Yuk. “De uitdaging is om een structuur of robot te ontwerpen die veel complexere taken kan uitvoeren.”
In plaats van het ontwikkelen van structuren met magnetische deeltjes met een gelijke , uniforme oriëntatie, heeft het team gezocht naar manieren om magnetische domeinen te creëren – delen met elk een specifieke oriëntatie van de magnetische deeltjes. Elke sectie beweegt onder invloed van een extern magnetisch veld op zijn eigen specifieke manier, afhankelijk van de bewegingsrichting van de deeltjes onder invloed van het magnetisch veld. De onderzoekers hadden het vermoeden dat ze zo structuren zouden kunnen maken die tot veel complexere bewegingen in staat zouden zijn.
Voorspellen
Met hun nieuwe 3D-printplatform kunnen de onderzoekers secties – of domeinen – printen van een structuur en de oriëntatie van de magnetische deeltjes in een specifiek domein nauwkeurig bepalen door de richting van de elektromagneet om de nozzle te veranderen terwijl het domein wordt geprint. Het team heeft ook het fysische model ontwikkeld dat voorspelt hoe een geprinte structuur zal vervormen onder invloed van een magnetisch veld. Op basis van de elasticiteit van het te printen materiaal, het domeinpatroon in de structuur en de wijze waarop een extern magnetisch veld wordt toegepast, kan het model voorspellen hoe de complete structuur vervormt of zich voortbeweegt.
Intelligente machines
Behalve de kreukelende ring, de zich dichtknijpende pijp en de spinachtige grijper zijn ook andere complexe structuren geprint, zoals diverse auxetische structuren die snel krimpen of uitzetten in twee richtingen. Ook is een ring geprint met geïntegreerde elektrische circuits en rode en groen leds. Afhankelijk van de oriëntatie van het externe magnetische veld, vervormt de ring en licht op geprogrammeerde wijze rood of groen op. “We hebben een printplatform en voorspellend model ontwikkeld dat anderen kunnen gebruiken. Ze kunnen eigen structuren en domeinpatronen ontwerpen, deze valideren met het model en ze vervolgens printen om verschillende functies te vervullen”, aldus Zhao. “Door het programmeren van complexe informatie over structuur, domein en magnetisch kan je zelfs intelligente machines als robots printen.”
Anderen lazen ook