9 mei. 2023
3 minuten
Door kleine zelfrijdende speeltjes in een ketting aaneen te koppelen, hebben onderzoekers van het UvA-Institute of Physics het perfecte systeem gevonden om de beweging van microscopische organismen en moleculaire motoren in onze cellen te bestuderen.
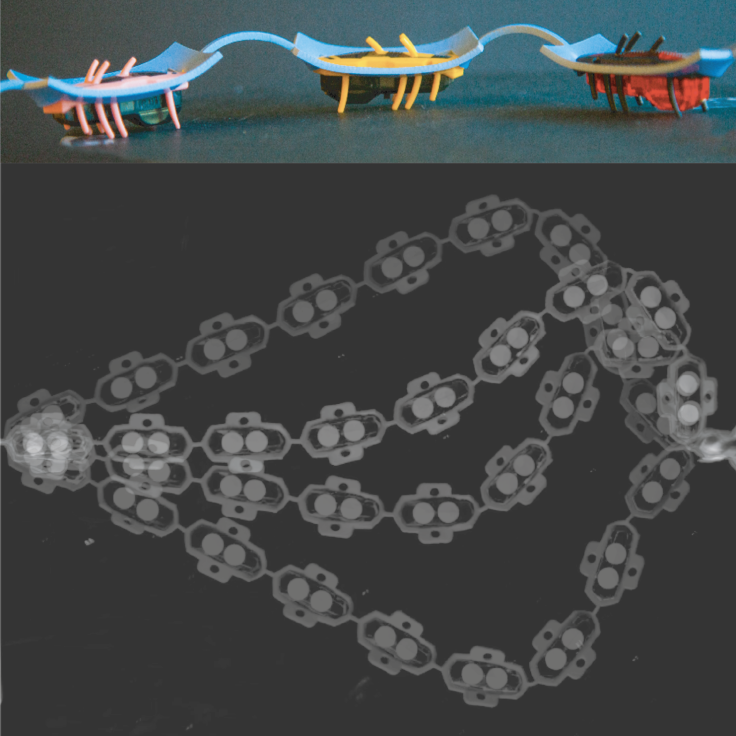
Hexbug Nano v2-microbots gebruiken trillingen om zichzelf voort te stuwen. Door meerdere van deze speeltjes met een elastische ketting van siliconenrubber aan elkaar te binden, wordt de resulterende keten elastoactief. Dit betekent dat de keten na vervorming probeert terug te keren naar zijn oorspronkelijke vorm, de zelfrijdende, actieve bestanddelen waar de keten uit bestaat continu proberen de structuur in een bepaalde richting te duwen.
Afhankelijk van de grootte van de kettingschakels en of de kettingen aan één of beide uiteinden vastzaten, vertoonden de elastische kettingen een reeks bewegingstypes, waaronder zelfoscillerend, zelfsynchroniserend en zelfomklappend.
“Door te experimenteren met deze elastoactieve kettingen ontdekten we dat er een wisselwerking is tussen activiteit en elasticiteit: wanneer activiteit domineert, oscilleren en synchroniseren de kettingen uit zichzelf”, zegt Corentin Coulais, hoofd van het Machine Materials Lab aan de Universiteit van Amsterdam.
Hij vervolgt: “Mechanische zelfoscillatie en synchronisatie zijn een belangrijk kenmerk van biologische machines, en nuttig voor het maken van nieuwe soorten autonome robots. De actieve ketens stellen ons echt in staat om de aard van deze niet-lineaire verschijnselen te achterhalen.”
Zelfoscillatie, zelfsynchronisatie en zelfomklapping
Zelfoscillatie houdt in dat een structuur vanzelf heen en weer beweegt. In de kettingen kunnen de microbots beginnen de ketting bijvoorbeeld naar links te buigen. Omdat de ketting echter aan één uiteinde is vastgezet, trekken de elastische schakels hem terug de andere kant op, waardoor de bots zodanig worden gedraaid dat ze de ketting naar rechts gaan duwen en buigen. Deze beweging wordt weer tegengewerkt door de elastische ketting, totdat de bots weer naar links beginnen te bewegen.
Synchronisatie vindt plaats wanneer twee elastische kettingen aan één uiteinde zijn verbonden door een staaf die stijf genoeg is. Door rond te kronkelen beginnen de twee verbonden kettingen automatisch met dezelfde frequentie te oscilleren, als plukjes zeegras die door dezelfde golven worden bewogen.
Als we ten slotte een enkele elastoactieve ketting nemen en beide uiteinden vastzetten, vertoont het ‘zelfomklappend’ gedrag. Als je een speelkaart met je vingers buigt, kun je hem laten omklappen om de andere kant op te buigen door hard genoeg vanaf de zijkant te duwen. De elastoactieve kettingen doen dit zelf, waardoor ze herhaaldelijk van links naar rechts te buigen.
Leerzaam spelen
“We begonnen dit onderzoek door gewoon wat te spelen met de microbot-speeltjes. Maar meer in het algemeen was het idee om materialen te onderzoeken die uit evenwicht zijn. In zachte materie zijn actieve vloeistoffen de afgelopen 25 jaar uitgebreid bestudeerd, maar hun vaste tegenhangers veel minder”, zegt Coulais.
Het volgende wat op het menu staat, is het onderzoeken van elastoactief gedrag op kleinere schaal, bijvoorbeeld in zogeheten ‘colloïdale systemen’ van kleine deeltjes in een vloeistof. Hoewel dat nog altijd modelsystemen zijn, benaderen ze het biologische system beter, dankzij vergelijkbare lengteschalen en de aanwezigheid van een vloeistof. Op elke schaal zou het ook interessant zijn om slim ontwerp te gebruiken om meerdere zelfoscillaties in te bedden in een enkele structuur om complexere bewegingspatronen te verkrijgen. Met een beter begrip van zelfoscillaties is de hoop dat het mogelijk wordt om nieuwe soorten autonome robots te creëren.
Publicatie
Self-Oscillation and Synchronization Transitions in Elastoactive Structures, Ellen Zheng, Martin Brandenbourger, Louis Robinet, Peter Schall, Edan Lerner, en Corentin Coulais. Physical Review Letters 130 (2023) 178202
Het laatste nieuws



Anderen lazen ook