17 feb. 1999
4 minuten

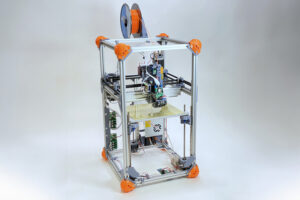
Aan de universiteit in Bristol kijkt men met een heel andere blik naar 3D-printen. Een zes-assige industriële robot van Mitsubishi is zo geprogrammeerd dat de snelheid waarmee de arm beweegt een rol speelt in het printproces. Een snelle beweging leidt tot dun materiaal. Zo kan men zelfs kant printen
Bij 3D-printen gaat het over het algemeen over een nauwkeurig gecontroleerd proces, zowel als het om de beweging gaat – met een stabiele versnelling en snelheid – als de materiaalaangroei. De machines worden eigenlijk op een gelijk wijze bestuurd als bij (drie-assige) NC-bewerkingen – maar dan langzamer.
Het Centre for Fine Print Research (CFPR) kijkt anders naar de 3D-printtechnologie: als een methode die je helpt om je via het materiaal uit te drukken. Hierbij draait het niet om het nauwkeurig reproduceren van digitale data, maar hoe de technologie als waardevolle expressievorm in de kunsten kan worden toegepast. Denk aan een pottenbakkersschijf. De kunstenaar staat in direct contact met de klei en combineert de eigenaardigheden van het materiaal met de mogelijkheden die de schijf biedt. Op die wijze kan de kunstenaar zich met het materiaal uitdrukken. Niet zelden door de materiaaleigenschappen tot het uiterste uit te buiten, bijvoorbeeld door het vervaardigen elegante, sierlijke vormen of het onthullen van nieuwe kwaliteiten van het materiaal zoal doorschijnendheid.
Verder kijken
Het CFPR met zijn uitgebreide achtergrondkennis over keramisch materialen, UV-harsen en thermoplasten, onderzoekt deze materialen met behulp van het robotplatform. Het doel is technologieën en technieken te ontwikkelen om het materiaal dynamisch te ‘voelen’ en manipuleren en het niet alleen maar rigide, ‘machinaal’ printlagen neer te leggen. Dit betekent dat je verder moet kijken dan het gebruik van eenvoudige CAD-modellen en de algoritmes om de opeenvolgende printlagen te creëren. Door zelf software te schrijven wordt het mogelijk printmethodes te ontwikkelen die meer uitgaan van het gebruik van het materiaal als expressiemiddel. De robot doorloopt printbanen die door de zelfontwikkelde software zijn gegenereerd en een hoge automatiseringsgraad en dynamisch reactievermogen vragen.
Tot het uiterste
Om dit te bereiken wordt de zesassige robotarm van Mitsubishi Electric MELFA RV-Series gebruikt. "Door de 3D-printmaterialen tot het uiterste te dwingen, hebben we onverwachte eigenschappen naar boven weten te brengen", aldus Paul O’Dowd, onderzoeker Creatieve Elektronica en Engineer. Zo kan het gedeponeerde kunststofmateriaal worden gemanipuleerd zolang het warm is en tot fijne draden worden getrokken. Keramisch materiaal kan zo worden neergelegd dat de materiaalsamenstelling in staat is zelf een glazuur te ontwikkelen na één keer stoken. Dit kan ook in andere industrieën toepassing vinden, meent O’Dowd.
Aantrekkelijke combinatie
Het met een robotarm manipuleren van materialen gedurende verschillende stadia – bijvoorbeeld het registreren van en reageren op de viscositeit – betekent dat aanvullende technologie noodzakelijk is. De MELFA-robot kan in realtime worden bestuurd en beschikt over een programmeerinterface die dit mogelijk maakt. Bovendien is het bereik voor een compacte robotarm aanzienlijk. De robotarm is volgens O’Dowd er behendig in het manipuleren van het materiaal in alle mogelijk richtingen. "Normaalgesproken zijn 3D-printers machines met drie lineaire assen en wordt geproduceerd in vaste horizontale lagen. Maar de RV Series-robotarm heeft zowel de bewegingsvrijheid als een reeks uitbreidingsmogelijkheden, inclusief pneumatica en digitale i/o, die mooi zijn geïntegreerd in de arm zelf." Volgens de onderzoeker levert dat een aantrekkelijke combinatie op van besturing van kracht, bewegingsbereik (908 mm reikwijdte) en betrouwbaarheid tegen een redelijke prijs.
Flexibel en open
De software die door het CFPR wordt ontwikkeld, moet snel en dynamisch kunnen reageren op veranderingen in de toestand van het materiaal en de constructie van het object. Het besturingsprogramma moet dus ook constant en iteratief zijn werkomgeving interpreteren en autonoom zijn gedrag aanpassen. "We hebben verschillende robotfabrikanten bekeken voor we besloten met Mitsubishi in zee te gaan. Wat we zochten was flexibiliteit en een open programmeeromgeving. Maar wat echt de doorslag gaf was het prijskaartje en de ondersteuning van Mitsubishi", motiveert O’Dowd de keuze. "We werden uitgenodigd op het hoofdkantoor in Engeland om de robot te evalueren en hebben tijdens het hele project goede technische ondersteuning ontvangen. Nu we de grenzen van de robot verder gaan opzoeken zullen we als we daar behoefte aan hebben voor training en ondersteun bij ze blijven aankloppen."
Keramiek en UV-hars
De Mitsubishi-robot heeft zich bewezen als ideaal gereedschap bij het creëren van kunstzinnige objecten in PLA (poly lactid acid: polymelkzuur), een biologisch afbreekbaar thermoplastisch materiaal. Het ontwikkelteam heeft alle bewegingsvrijheid van de robot benut en door het materiaal buiten de normale gebruiksomstandigheden te dwingen nieuwe effecten weten te creëren. De intuïtieve en eenvoudig te gebruiken programmeerinterface werkt goed met de software die de extrusiesnelheid van het printmateriaal wijzigt om zo het materiaal in fijne draden te kunnen trekken. Het is de bedoeling eenzelfde opstelling te gebruiken voor het ontwikkelen van artistieke creaties met keramische materialen en UV-harsen en dat productieproces zou dan ook toepassing kunnen vinden in commerciële industriële toepassingen.
Anderen lazen ook