17 feb. 1999
1 minuut
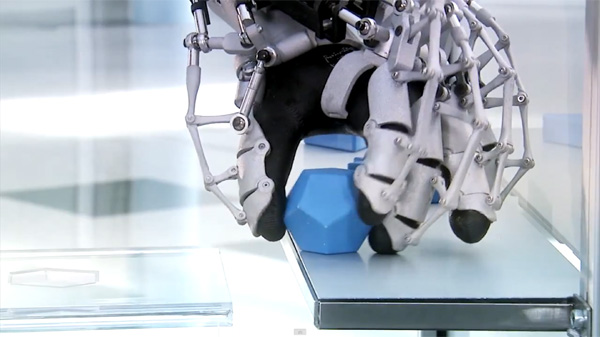
De Exohand, een handschoen ontworpen om de menselijke grijpkracht te verdubbelen, trok veel belangstelling op de Hannover Messe deze week. De handschoen moet de drager extra behendigheid geven bij het oppakken van moeilijke voorwerpen en extra grijpkracht geven waar nodig.
De hand is een mooi voorbeeld van een zogeheten ‘mechanisch exoskelet’, waarbij alle gewrichten en aandrijfunits zich buiten de hand bevinden in de vorm van een exoskelet.
De vingers kunnen bewegen en de grijpkracht van de menselijke hand wordt hiermee verdubbeld. De handbewegingen van de gebruiker worden in real time vertaald naar de robothand.
Robothand op perslucht
De Exohand gebruikt pneumatische actuatoren op iedere vinger om het bereik van een menselijke vinger te simuleren. De actuatoren bewegen de vingers open en dicht. Volgens Festo (de ontwerper van de hand) werden non-lineaire aansturingsalgoritmen gebruikt met een CoDeSys-compliant controller, wat resulteert in een zeer precieze oriëntatie van de individuele vingergewrichten.
Een CoDeSys-controller zorgt ervoor dat de positie en de krachten worden verwerkt. De controller regelt vervolgens de juiste druk in de cilinders om de juiste vingerpositie en krachtuitoefening te verkrijgen.
Heinrich Frontzek, een woordvoerder van Festo op de beurs, zei dat er een ingebouwde ‘krachtbooster’ achteraan de handschoen zit ingebouwd. "Die werkt met kleine luchtcilinders die kracht geven aan iedere vinger met de perslucht die er doorheen wordt geblazen. Dankzij die booster kunnen we de grijpkracht verdubbelen", aldus Frontzek.
Toepassingen van de ExoHand
Het exoskelet past over een menselijke hand, maar ook over een kunsthand van siliconen. Festo ziet daarom ook toepassingen voor het op afstand uitvoeren van precieze handelingen, op plekken waar een mens teveel risico’s zou lopen. Denk hierbij aan toepassingen in rampgebieden of binnen een laboratoriumomgeving.
Hoewel de Exohand nog slechts een conceptmodel is, geeft het toch een fascinerend kijkje in de toekomst.
bron: Festo / Physorg
Anderen lazen ook