2 mrt. 2023
3 minuten
Men werkt al decennia lang aan robothanden die de behendigheid van menselijke handen evenaren. Tot nu toe zijn die niet bestand tegen de fysieke schokken. Een onderzoeksteam heeft nu een compacte robotvinger ontwikkeld die tegelijkertijd behendig is en bestand is tegen fysieke schokken in de werkomgeving.
Robots werken vaak in omgevingen die onvoorspelbaar en soms onveilig zijn. Fysieke botsingen kunnen niet worden vermeden wanneer robothanden met meerdere vingers nodig zijn om in ongestructureerde omgevingen te werken, zoals omgevingen waar obstakels snel bewegen of de robot moet communiceren met mensen of andere robots. De energie die door deze schokken wordt gegenereerd, kan de hardwaresystemen van de robothanden beschadigen.
De huidige technologie met robothanden maakt gebruik van een actuatorsysteem met variabele stijfheid. Deze systemen zijn ontworpen om de behendige eigenschappen van de robothand mogelijk te maken. In het menselijk lichaam varieert de natuurlijke stijfheid en flexibiliteit van de spieren afhankelijk van de uit te voeren taak. De actuatoren met variabele stijfheid zorgen voor mensachtige flexibiliteit en aanpassing van de stijfheid aan de robothand, afhankelijk van de uit te voeren taak.
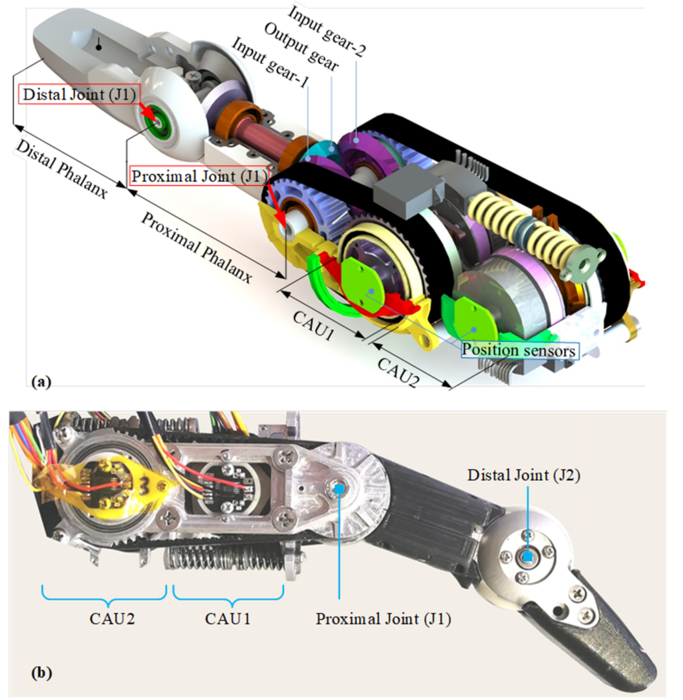
De actuator met variabele stijfheid wordt aangedreven door twee actuators. Dit betekent dat het robothandsysteem twee sets vertragers, bedieningsinrichtingen en sensoren moet hebben. Omdat de complexiteit, het gewicht en het volume van de actuator met variabele stijfheid allemaal zijn toegenomen, is het niet bruikbaar als oplossing bij het creëren van de compacte behendige hand.
Van kabel naar tandwiel
Om deze uitdagingen het hoofd te bieden, ontwikkelde het onderzoeksteam een antagonistisch vingermechanisme met variabele stijfheid. Deze vinger is gebaseerd op een tandwieloverbrenging die doorgaans betrouwbaarder en gemakkelijker te vervaardigen en te onderhouden is dan de huidige behendige handen met kabelaandrijving. De mechanisch robuuste vinger is gebaseerd op het concept van mechanische passieve compliantie, waarbij de contactkrachten tussen een robotmanipulator en een stijve omgeving worden gecontroleerd. De mechanische vinger kan fysieke schokken opvangen, terwijl hij ook de mogelijkheid heeft om zijn stijfheid aan te passen, afhankelijk van de vereisten van de taak die hij uitvoert. Het voordeel van dit vingermechanisme is dat het een instelbare stijfheidsfunctie en een zeer compacte structuur biedt zonder het gewicht en de complexiteit van extra actuatoren.
Het prototype weegt 480 gram en is vervaardigd met legeringsmateriaal en 3D-geprint materiaal. Het team voerde een reeks grijp- en manipulatietests uit op de vinger. Ze gebruikten een verscheidenheid aan typische objecten – cilindrische objecten, rechthoekige objecten en bolvormige objecten – van verschillende groottes om het grijpvermogen van de vinger te testen.
Volgens het team is hun vingermechanisme robuust gebleken in het weerstaan van fysieke schokken, terwijl het ook goed presteert voor kracht, grijpen en manipuleren. Het is van plan om het aanpassingsbereik voor de stijfheid van de vinger te verbeteren, en hem compacter te maken qua formaat en gewicht. Het uiteindelijke doel is het ontwerp en de vervaardiging van een volledig behendige hand.


Anderen lazen ook