30 jun. 2020
2 minuten

Een aan de Universiteit van Zürich ontwikkeld navigatiealgoritme stelt drones in staat uitdagende acrobatische manoeuvres te leren. Autonome quadcopters kunnen met simulaties worden getraind om hun snelheid, behendigheid en efficiëntie te vergroten, wat de conventionele zoek- en reddingsoperaties ten goede komt.
Sinds het begin der vluchten hebben piloten acrobatische manoeuvres gebruikt om de grenzen van hun vliegtuigen te testen. Hetzelfde geldt voor vliegende drones: professionele piloten meten vaak het kunnen van hun drones en hun beheersingsniveau door in competities manoeuvres te vliegen.
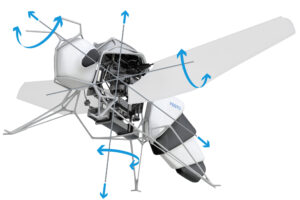
In samenwerking met Intel heeft een team van onderzoekers van de Universiteit van Zürich nu een quadcopter ontwikkeld, die kan leren acrobatische manoeuvres te vliegen. Hoewel een power loop of een barrel-rol misschien niet nodig is bij conventionele drone-operaties, is een drone die dergelijke manoeuvres kan uitvoeren waarschijnlijk veel efficiënter. Hij kan de behendigheid en snelheid ook benutten in een ‘normale’ vlucht en een grotere afstand afleggen voor de batterij leeg is.
De onderzoekers hebben een navigatiealgoritme ontwikkeld waarmee drones autonoom verschillende manoeuvres kunnen uitvoeren – met niets meer dan metingen van sensoren die ze aan boord hebben. Om de efficiëntie van hun algoritme aan te tonen, vlogen de onderzoekers manoeuvres zoals een power loop, een barrel roll of een matty flip, waarbij de drone onderhevig is aan een zeer hoge stuwkracht en extreme hoekversnelling. "Deze navigatie is een nieuwe stap in de integratie van autonome drones in ons dagelijks leven", zegt Davide Scaramuzza, professor robotica en hoofd van de robotica- en perceptiegroep aan de Universiteit van Zürich.
Training met simulatie
De kern van het nieuwe algoritme is een neuraal netwerk dat input van de ingebouwde camera en sensoren combineert en deze informatie rechtstreeks vertaalt in besturingsopdrachten. Het netwerk wordt uitsluitend getraind door gesimuleerde acrobatische manoeuvres. Dit heeft verschillende voordelen: Manoeuvres kunnen eenvoudig worden gesimuleerd via referentietrajecten en vereisen geen dure demonstraties door een menselijke piloot. Training kan worden geschaald naar een groot aantal verschillende manoeuvres en vormt geen fysiek risico voor de quadcopter.
Een paar uur simulatietraining is voldoende om de quadcopter gebruiksklaar te maken, zonder verdere verfijning met echte data. Het algoritme gebruikt abstractie van de sensorische input van de simulaties en brengt deze over naar de fysieke wereld. "Ons algoritme leert acrobatische manoeuvres uit te voeren die zelfs voor de beste menselijke piloten uitdagend zijn", zegt Scaramuzza.
De onderzoekers erkennen echter dat menselijke piloten nog steeds beter zijn dan autonome drones. "Menselijke piloten kunnen onverwachte situaties en veranderingen in de omgeving snel verwerken en zijn sneller aan te passen", zegt Scaramuzza. Desalniettemin is de hoogleraar robotica ervan overtuigd dat drones die worden gebruikt voor zoek- en reddingsmissies of voor bezorgdiensten baat zullen hebben bij het snel en efficiënt afleggen van lange afstanden.
Anderen lazen ook