20 nov. 2019
4 minuten
Een team van MIT en TU Delft heeft een nieuw systeem ontwikkeld dat autobestuurders classificeert als egoïstisch of altruïstisch. Dit kan niet alleen helpen om zelfrijdende auto’s (AV’s) beter te laten navigeren, maar is ook toepasbaar op robots en cobots.
De wetenschappers publiceren hierover in de Proceedings of the National Academy of Sciences (PNAS).
De zelfrijdende auto komt eraan. Maar met al zijn gevoelige sensoren en verfijnde mogelijkheden voor dataverwerking ontbreekt het zelfs de meest innovatieve auto aan sociaal bewustzijn. De autonome technologieën zijn weliswaar aanzienlijk verbeterd, maar uiteindelijk beschouwen ze de verkeersdeelnemers om hen heen nog altijd slechts als obstakels in de vorm van enen en nullen, en niet als mensen met eigen intenties, motivaties en persoonlijkheden.
Het team heeft onderzocht of zelfrijdende auto’s zo kunnen worden geprogrammeerd dat ze de sociale persoonlijkheid van andere bestuurders kunnen classificeren, opdat ze beter kunnen voorspellen wat andere auto’s gaan doen en dus veiliger met hen aan het verkeer kunnen deelnemen.
De onderzoekers hebben instrumenten uit de sociale psychologie geïntegreerd om rijgedrag te classificeren volgens de mate van egoïsme of altruïsme van individuele bestuurders. Javier Alonso-Mora: "Dit werk maakt het mogelijk voor autonome voertuigen om na te denken over de intenties van andere verkeersdeelnemers en over de consequenties van de eigen acties."
Meer specifiek maken de wetenschappers gebruiken van Social Value Orientation (SVO), ofwel de mate waarin iemand zelfzuchtig (‘egoïstisch’) dan wel onbaatzuchtig of coöperatief (‘pro-sociaal’) is. Het systeem maakt per bestuurder een schatting van de SVO om in real time routes voor zelfrijdende auto’s te berekenen. Alonso-Mora: "Het meenemen van SVO bij de planning zal niet alleen autonome voertuigen slimmer maken maar zal ook tot verbeteringen leiden bij de interactie van robots met andere robots en met mensen."
Betere voorspellingen
Het algoritme wist het gedrag van andere auto’s 25% beter te voorspellen bij de taken ‘invoegen’ en ‘onbeveiligd links afslaan’. De auto wachtte bijvoorbeeld met links afslaan wanneer de naderende tegenligger een meer ‘egoïstische’ bestuurder had, terwijl hij sneller afsloeg als de andere auto ‘pro-sociaal’ was.
Hoewel het systeem nog niet robuust genoeg is om in echt verkeer te worden geïmplementeerd, levert het al enkele interessante toepassingen op, en niet alleen voor auto’s die zichzelf besturen. Stel, je bent aan het rijden en plotseling duikt er een auto op vanuit je blinde hoek. Dan zou het systeem een waarschuwing in je achteruitkijkspiegel kunnen geven dat die auto een agressieve bestuurder heeft, zodat je je gedrag daarop kunt aanpassen. Ook zou het zelfrijdende auto’s kunnen leren om meer ‘menselijk’ gedrag te vertonen dat gemakkelijker te begrijpen is voor andere bestuurders.
"Werken met en tussen mensen betekent dat je hun bedoelingen probeert te doorgronden om hun gedrag beter te begrijpen", aldus promovendus Wilko Schwarting. "De neiging om meegaand of juist competitief te zijn, nemen mensen vaak mee in hun rijgedrag. Met dit onderzoek wilden we ontdekken of je dit ook echt kunt kwantificeren."
AV’s meestal van achteren aangereden
Een belangrijk probleem met zelfrijdende auto’s is dat ze zijn geprogrammeerd om ervan uit te gaan dat alle mensen op dezelfde manier handelen. Dit betekent onder meer dat ze erg behoudend zijn als ze beslissingen nemen op kruispunten en splitsingen. Deze voorzichtigheid vermindert weliswaar de kans op dodelijke ongelukken, maar veroorzaakt ook bottlenecks die voor andere bestuurders frustrerend kunnen zijn en door hen sowieso slecht worden begrepen. Dat is wellicht de reden waarom zelfrijdende auto’s bij verkeersincidenten meestal van achteren worden aangereden door ongeduldige bestuurders.
"Het realiseren van meer ‘menselijk’ gedrag bij autonome voertuigen is een fundamentele voorwaarde voor de veiligheid van inzittenden en omringende voertuigen, omdat mensen dankzij voorspelbaar gedrag beter begrijpen wat AV’s doen en daar beter op kunnen reageren", zegt Schwarting.
Speltheorie
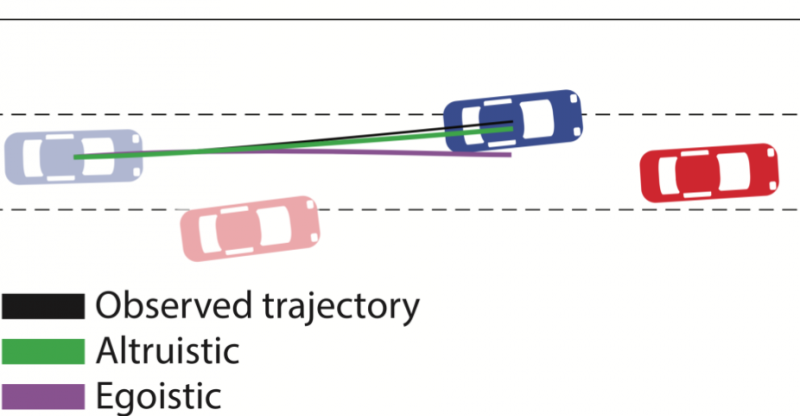
Om het sociaal bewustzijn van de auto te vergroten, heeft het team methoden uit de sociale psychologie gecombineerd met speltheorie, een kader voor het ontwerpen van sociale situaties tussen concurrerende spelers. Het team heeft modellen gemaakt van verkeersscenario’s waarin elke bestuurder zijn eigen nuttige effect trachtte te maximaliseren en zijn beste reacties analyseerde in het licht van de beslissingen van alle andere deelnemers. Op basis van een heel klein beetje beweging van andere auto’s kon het algoritme vervolgens het gedrag van de omringende auto’s voorspellen als coöperatief, altruïstisch of egoïstisch, waarbij de eerste twee onder de noemer ‘pro-sociaal’ werden gebracht. De scores voor deze eigenschappen berusten op een continuüm, een glijdende schaal van de mate waarin iemand zorg voor zichzelf versus zorg voor anderen vertoont.
In de invoeg- en afslagscenario’s waren de twee mogelijke uitkomsten dat je iemand liet invoegen (‘pro-sociaal’) of juist niet (‘egoïstisch’). Uit de resultaten bleek, niet verrassend, dat invoegende auto’s competitiever zijn dan niet-invoegende auto’s. Het systeem is getraind om beter te navigeren door verschillende soorten gedrag te vertonen op momenten waarop dat gepast is. Zelfs de meest hoffelijke bestuurder weet immers dat bepaalde handelingen – zoals wisselen van rijstrook in druk verkeer – een moment van extra assertiviteit en besluitvaardigheid vereisen.
Volgende fase
In de volgende fase van het onderzoek is het team van plan zijn model toe te passen op voetgangers, fietsers en andere verkeersdeelnemers. Daarnaast gaat het onderzoek doen naar andere robotsystemen die tussen mensen werken, zoals huishoudrobots, en SVO integreren in de voorspel- en beslisalgoritmen van die systemen.
Anderen lazen ook