5 sep. 2013
9 minuten
Voor tal van industriële toepassingen worden capacitive en inductieve sensoren gebruikt waarbij een of meerdere vaste werkfrequenties gekozen zijn. Voor hun toepassingen liggen de werkfrequenties van deze sensoren in het 1 tot 100 kHz bereik.
Mart Coenen
EMCMCC bv, Eindhoven
Evenzo liggen er werkfrequenties van een groot aantal andere elektronische applicaties in hetzelfde frequentiegebied waaronder: SMPS-en, PWM-motorregelingen; draaistroom of lineair, solid-state TL-balasten, contactloze vermogensoverdracht, e.d. En groot aantal sensoren geven hun informatie analoog uit als stroom; 4 – 20 mA of als seriële digitale data. Door het toepassen van een simpel filteralgoritme kunnen bij de digitale sensorvarianten een of meerdere externe stoorsignalen uit het gewenste meetsignaal eenvoudig worden onderdrukt. Helaas gaat dit ten koste van een effectieve dynamiek omdat de ruisvloer door elke signaalbewerking toeneemt.
Probleemstelling
Om capacitieve of inductieve sensoren te kunnen gebruiken moet er gebruik gemaakt worden van wisselspanningssignalen (in het frequentiedomein) of pulsvormige signalen (in het tijdsdomein) om de fysische parameters om te zetten in elektrische grootheden. De toepassing van capacitieve of inductieve sensoren kan zeer divers zijn en varieren van plaats- of verplaatsingsopnemers, druk- of flowmeters (ook verplaatsing) maar ook op micro-schaal de uitlezing van vingerafdrukkingen of een contactloze muis, touchscreen of joystick bij een PC of mobiele telefoon applicatie.
In al deze applicaties wordt gebruik gemaakt van veranderende (sensor) impedantie in de vorm van varierende stroom en/of spanning over een of meerdere sensoren in het systeem. Het bronsignaal en het meetsignaal hebben een vaste werkfrequentie t.o.v. een intern kloksignaal en soms wordt er t.b.v. een referentie-overdrachtsmeting een tweede werkfrequentie gebruikt. Bij gebruik van een sensorsysteem met een of meerdere sensoren kan op een aantal manieren en poging gedaan worden om het stoorsignaal te analyzeren t.o.v. de functionele signalen op de een of twee werkfrequenties en hiervoor te corrigeren.
Wanneer van de verstoorde functionele sensorsignalen, de oorspronkelijke werkfrequentie signalen worden afgetroken, deze zijn fasesynchroon, dan blijft alleen het stoorsignaal of de stoorsignalen over. Helaas is, in tijdvariante systemen, het stoorsignaal op het moment dat dit na deze signaalbewerking is vastgesteld niet meer geheel identiek aan het instantane stoorsignaal wat dan op
dat moment aanwezig is. Een gedeeltelijke compensatie van het stoorsignaal kan plaatsvinden maar geen volledige onderdrukking. Indien de frequentie van het stoorsignaal niet stabiel is t.o.v de werkfrequenties van de sensoren dan kan het bewerken van het instantane sensorsignaal ook averechts werken. Ook indien de frequentie van het stoorsignaal een groot veelvoud van samples nodig heeft om zijn herhalingsfrequentie (= nuldoorgangen) te kunnen vaststellen, dan treedt er middeling op het stoorsignaal op wat niet instantaan te compenseren is.
In deze probleemstelling wordt er van uitgegaan dat het analoge front-end van de sensor tot aan de discretisatie lineair en onvervormd is. Effecten zoals slewing en clipping kunnen niet simpel door softwarematige nabewerkingen worden gecompenseerd.
Mogelijke oplossingen
De mogelijke oplossingen kunnen worden gezocht door het feit dat de frequentie en ook het amplitude van een stoorsignaal niet instantaan en volledig veranderd zoals bij FSK of PSK modulatie en dat het stoorsignaal in een volgende draagggolfperiode slechts een bescheiden afwijking heeft t.o.v. de eerder gesampelde periode. Tevens kan door een aanname; dat het gaat om een symmetrisch AC signaal, worden gesteld dat men slechts een halve periode hoeft te samplen en te vertragen om het gehele stoorsignaal te kunnen compenseren/ corrigeren.
Een andere oplossing kan/ moet gevonden worden in het vaststellen van de instantane stoorsignaal m.b.v. een extra nabijgeplaatste sensor. Door de gemeten verstoringen van het "dummy" sensorsignaal op dezelfde wijze te vertragen als de functionele meetsignalen in het vorige geval, dan kan de overdrachtsfunctie van deze extra sensor naar het hoofdmeetsysteem worden vastgesteld. Door deze overdrachtsfunctie toe te passen kan instantaan het stoorsignaal worden afgetrokken van de sensor-meetsignalen, hetzij analoog of digitaal.
Op een zelfde wijze kan door middel van het sequentieel samplen van de sensoren een extra sensor worden nagebootst, zij het weer met het behoud van vertraging. Deze oplossing is dan de combinatie van de twee bovengenoemde oplossingen.
Toepassing
In het sensorsysteem wordt met een redelijke bandbreedte van enkele kHz-en het sensorsignaal gevolgd. Voor de probleemanalyse wordt aangenomen dat het stoorsignaal zich op iets meer dan 1 kHz van een van de werkfrequenties van het meetsysteem bevindt en dat dit stoorsignaal niet ongecorreleerd is met de werkfrequenties van het meetsysteem. Verder bezit het stoorsignaal nog een digitale amplitude modulatie met zijbanden, die afhankelijk zijn van de belasting in het externe systeem.
De amplitudemodulatie op het stoorsignaal is aselect pulsvormig gesteld met een herhalingsfrequentie van een paar honderd Hertz, dus met een sin(x)/x zijbanden patroon en met een modulatiediepte van ongeveer 10% t.o.v. de vaste draaggolffrequentie.
Het onderdrukken van een stoorsignaal met de gemiddelde grondfrequentie van de stoorbron levert dus op basis van het gestelde een verbetering van 20 dB en kan dan niet verder worden verbeterd omdat dan de zijband-informatie gaat domineren.
Een verder verbetering vraagt dan om een instantane correctie op alle sensorsignalen, of als tussenstap met een mininale delay t.o.v. het orginele stoorsignaal. Door de afgeleide te bepalen van het stoorsignaal verminderd met het stoorsignaal van een halve periode vertraagd, kan de efficientie van deze oplossing worden geanalyseerd. Uit analyse blijkt dat een factor van ongeveer 100 (40 dB) te realiseren is.
Er vanuit gaande dat de modulatiefrequentie op het stoorsignaal laag is dan heeft het geen zin hiervoor te compenseren omdat dit een te lange delay (= zeer veel samples) vraagt. Bij een modulatie van 100 tot 300 Hz, dan moet eerst de pulsbreedte worden bepaald over meerdere modulatieperioden en indien deze quasi-constant is, dan kan dit signaal worden gecompenseerd. Indien de modulatie niet constant is en de storing is dominant, dan moet met actief i.p.v. reactief ingrijpen. 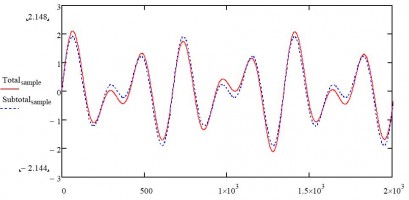
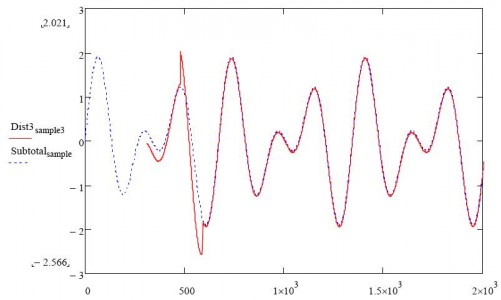
Figuur 1 – Golfvormen van het functioneel signaal, zonder en met het storend signaal
Voorbeeld
In een sensorsysteem wordt gebruikt gemaakt van 2 vaste frequenties; een referentie- en een meetfrequentie en het systeem heeft zijn eigen ruis. Op zowel het referentie als het meetsignaal wordt een stoorsignaal ingekoppeld. Beide sensorsignalen zijn gelijk in amplitude gesteld, wat voor de werking van de
compensatie niet noodzakelijk is. Het amplitude van het stoorsignaal is op 20% verondersteld, relatief t.o.v. de amplitudes van de functionele meetsignalen. Het functionele signaal in het tijdsdomein wordt dan zoals aangegeven in figuur 1; Subtotal. Het signaal met verstoring is aangegeven in figuur 1; Total.
Omdat het stoorsignaal niet gecorreleerd is met de signalen van het meetsysteem, maar de signalen van het meetsysteem zijn wel gecorreleerd met zichzelf, kan de verstoring op het meetsignaal worden herleid door de twee frequentiecomponenten er m.b.v. een dubbel kam- of FIR-filter er van af te halen waardoor het stoorsignaal en wat ruis overblijft.
Door een digitaal filter op te zetten zoals aangegeven in figuur 2 kunnen de twee functionele frequentiecomponenten; F1, F2 er worden uitgefilterd zodat alleen het stoorsignaal; Z, met een toename van de systeemruis; Noi, welke net als het stoorsignaal volledig ongecorreleerd is verondersteld.
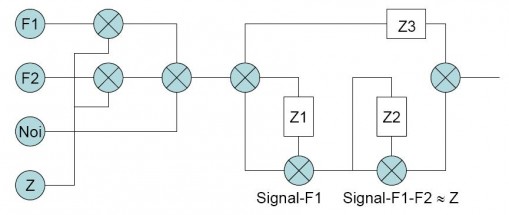 Figuur 2 – Flow van een corrigerende signaalbewerking
Figuur 2 – Flow van een corrigerende signaalbewerking
Consequenties
De consequentie van het actief (adaptief) filteren op een of meer stoorcomponenten is dat gedurende een EMC test onzinnige consequenties kunnen worden getrokken m.b.t. de RF immuniteit van een dergelijk meetsysteem, voor zover dat er überhaupt immuniteitsmetingen verricht worden in deze frequentieband beneden de 150 kHz.
Er komt dus een extra dimensie bij namelijk: bij het evalueren van een dergelijk adaptief meetsysteem blijkt dat er systeemkennis nodig is om de response te kunnen waarderen. Een adaptief filter heeft een bepaalde responsetijd en een gelimiteerde bandbreedte waarin dit haar werk kan doen. Met een eenvoudige RF immuniteitstest m.b.v. een frequentie scan door deze band, zelfs met een lange "dwell time", zullen de voordelen van een dergelijke oplossing niet direct zichtbaar gemaakt kunnen worden.
Door op het totale meetsignaal de bovengestelde bewerking uit te voeren kan het stoorsignaal met minimale vertraging/ delay worden herleid en de stoor-component met een toename van √2 voor de ruis worden bepaald. Door het totale signaal ook te vertragen en hiervan de gevonden stoorcomponent af te trekken, wordt het functionele signaal weer hersteld met een ruistoename van een factor √3, zie figuur 3.
Figuur 3 – Het originele meetsignaal en het herstelde signaal na adaptieve filtering
Indien de afgeleide van de stroorspanningsmodulatie een grotere tijdconstante heeft dan de tijdvertraging, dan is het correctiesysteem in staat de afwijking te corrigeren. In dit model is een digitale modulatie aangenomen, waardoor er na het inregelen alleen bij de overgangen van de digitale modulatie er kortstondig een fout overblijft, zie figuur 3 en 4, die door verdere "smoothing" of een "voorscheidend gemiddelde filtering" is te elimineren.
Bij de fout die overblijft na inregeling blijkt in maximaal amplitude kleiner te zijn dan het nominale stoorsignaal wat op 0,2 (20 %) was gesteld. Verder is in deze analyse een echte digitale amplitudemodulatie gebruikt met 10 % modulatie index. De frequentie van de draaggolf van het stoorsignaal is net als de gekozen modulatiefrequentie als priemgetal gekozen om correlatie uit te sluiten.
Doordat de gekozen oplossing re-actief is, is het adaptief systeem ook in staat om op langzame (stoor) draaggolffrequentievariaties te volgen. Deze draaggolf-frequentievariatie wordt vaak herkend als een zwevingssignaal (beat frequency) doordat de twee of meerdere signalen; het stoorsignaal en de meetsignalen uit verschillende kristalreferenties zullen zijn afgeleid.
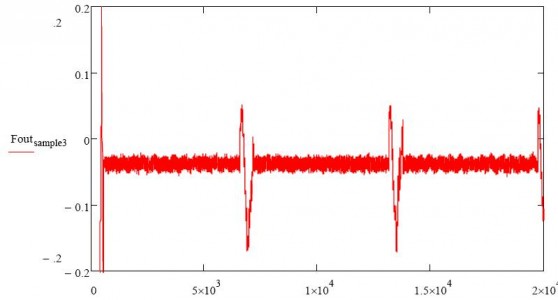 Figuur 4 – Fout op de meetsignalen na correctie
Figuur 4 – Fout op de meetsignalen na correctie
Het gegeven algorithme is een oplossing die bedacht is t.b.v. een applicatie met een grote "installed base", waarbij het vervangen van de hardware; de sensoren en het meetsysteem, geen optie is en een software-matige upgrade wel uitvoerbaar is/ blijkt te zijn.
Conclusies
– Hoewel de softwarematige oplossing een correctie is op een meetsysteem dat verstoord is, kan het helpen om bij aanwezigheid van min of meer stabiele stoorsignalen re-actief te onderdrukken.
– Door het gekozen software algorithme is de overhead in de signaalbewerking klein en blijft de tijdsvertraging op het actuele meetsignaal kort en de meetbandbreedte hoog.
– Andere mogelijkheden voor een alternatieve stoorsignaalcorrectie/ onderdruk-king zijn gemeld maar niet verder uitgewerkt in deze bijdrage [1, 2, 3].
– Voor snel en sterk in de tijd varierende stoorsignalen, bijvoorbeeld spread-spectrum stoorbronnen van bijvoorbeeld van een "self-oscillating power supply (SOPS)" of frequentie-hoppende oscillatoren is het gegeven algorithme niet effectief.
– Ook voor het onderdrukken van stoorsignalen met een draaggolffrequentie die exact op (sub-)harmonischen van de meetfrequentie liggen zal het algorithme niet functioneren, daar de stoorsignaalinformatie met het wegfilteren van de meetsignaalinformatie ook wordt weggehaald dan wel wordt versterkt.
– Indien er RF immuniteitmetingen worden uitgevoerd beneden de 150 kHz, dan moet rekening gehouden worden met het trage, reactieve gedrag van het corrigeerde algoritme.
Referenties
[1] Time-discrete signal analysis, Alan V. Oppenheim, John R. Buck, Ronald R. Schafer, Prentice Hall [2] Digitale signaalbewerking, A.W.M van den Enden, N.A.M. Verhoeckx, Educatieve Delta Press, 3e druk
[3] Optimization theory with applications, Donald R. Pierre, Dover
[4] Hands-on systematic innovation, Darrell Mann, Creax
[5] Sensor Handbook, Sabrie Soloman, McGraw-Hill
Anderen lazen ook