
7 sep. 2022
2 minuten
Hoe komen ze op veiligheidsniveau PLd en niet op PLe bij de robotintegratienorm terwijl ongelukken ernstig kunnen zijn?
Vraag
In de C-norm voor het integreren van robots (EN-ISO 10218-2) staat dat hiervoor PLd voldoende is als aan verschillende eisen is voldaan, maar vaak zijn zeker de severity (ernst van verwonding) en avoidance (mogelijkheid om gevaar te ontwijken) hoog, terwijl ook de frequency (hoe vaak komt de verwonding voor) al gauw hoog is (bij het wegdenken van de afscherming: het kale gevaar). Dan zou je op PLe uitkomen. Kun je dit kort toelichten?
Antwoord FUSACON
In de norm voor integratie van robots de EN-ISO 10218-2:2011 wordt in hoofdstuk 5.2.1 inderdaad gesproken over een veiligheidsniveau PLd category 3 of SIL 2 met hardware fault tolerance 1. Echter er wordt hierbij gesproken over een minimumniveau, zoals blijkt uit de normtekst:
- 5.2.1 General
Safety-related control systems (electric, hydraulic, pneumatic and software) shall comply with 5.2.2, unless the results of the risk assessment determine that an alternative performance criterion as described in 5.2.3 is appropriate.
machine. - 5.2.3 Other control system performance criteria
The results of a comprehensive risk assessment performed on the robot system and its intended application may determine that a safety-related control system performance other than that stated in 5.2.2 is warranted for the application. - Selection of one of these other safety-related performance criteria shall be specifically identified, and appropriate limitations and cautions shall be included in the information for use provided with the affected equipment.
Het kan dus zeker voorkomen dat het risiconiveau op basis van de uitkomst van een risicobeoordeling tot een hoger PL of SIL niveau dienen te leiden.
Kijkend naar de nieuwe risicomatrix (zie tabel hieronder) uit Bijlage A van de norm EN-IEC 62061:2021 kan het inderdaad zo zijn dat het risiconiveau van een bepaalde besturingstechnische reductiemaatregel op PLe category 4 of SIL 3 met hardware fault tolerance 1 uit dient te komen.
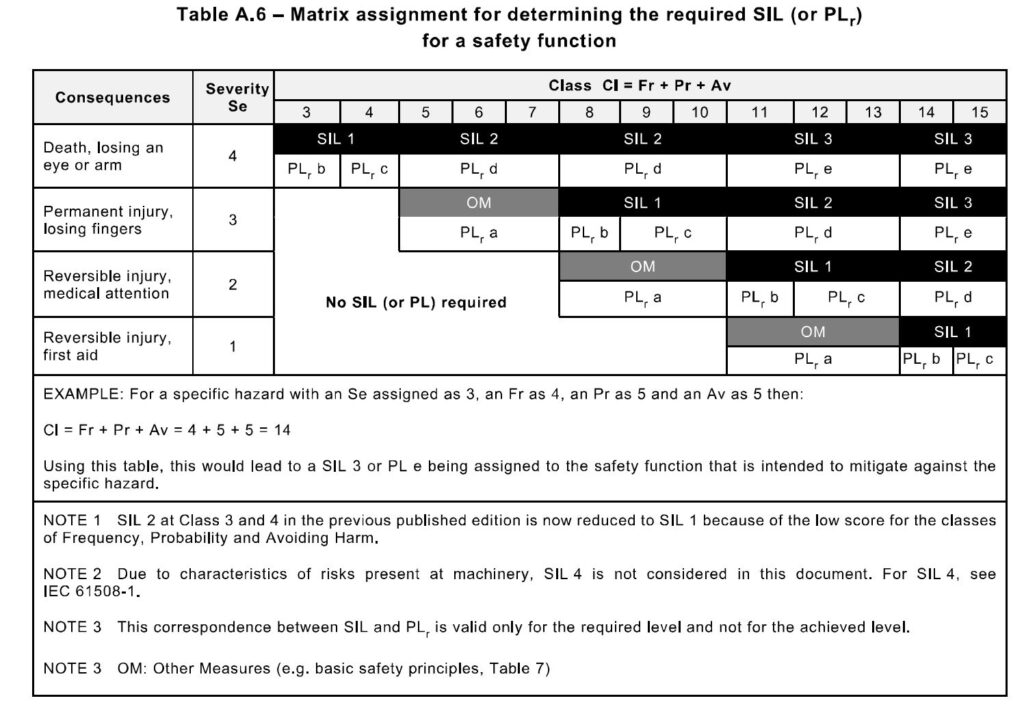
Bij een grote industriële robot is het mogelijk dat de volgende parameters voor een toegangsdeur dienen te worden gekozen:
Se = 4; Dood door een klap van de robotarm.
Fr = 4; Er is slechts ca. 5 keer per dag toegang nodig voor het rechtzetten van een product.
Pr = 5; Het is een volautomatische machine en de beweging vindt continu plaats. Standaard keuze is 5.
Av = 3; Ontwijken is mogelijk omdat er voldoende ruimte in de cel is, maar de robot gaat wel sneller dan 250 mm/sec.
De Class is dan 3 + 5 + 4 = 12.
Met een ernst Se = 4 betekent dit dat het vereiste SIL niveau op PLe of SIL 3 uitkomt.
Deze vraag is beantwoord door Fusacon BV




De bovengenoemde waarde zijn volgens mij voor ongeveer alle industrielle robots van toepassing en dus zou PL=e veel meer voor de hand liggen. Daarmee is voor mij nog niet verklaart waarom in de norm PL=d staat vermeld. Daarbij als in de HSRA een PL=e komt is de betreffende robot zelf altijd PL=e?
Beste Marc, Het is inderdaad voor de hand liggend dat bij veel industriële robotapplicaties een PLe categorie 4 vereist wordt in plaats van PLd categorie 3. Dit zou ook betekenen dat het veiligheidsniveau van de robot (controller) zelf ook PLe categorie 4 dient te zijn. Ik heb het idee dat dat wellicht een uitdaging is. Een oplossing kan zijn om buiten de robot controller om ook nog een afschakeling te verzorgen.
Mocht de uitkomst uit de risicobeoordeling lager uitkomen, bijvoorbeeld PLr C, dan moet volgens de norm toch PLr D worden gebruikt.
Inderdaad is je analyse van de tekst correct. Een industriële robot zou volgens par. 5.4.2 van ISO 10218-1 minimaal aan PLd categorie 3 moeten voldoen.