19 mrt. 2018
8 minuten

In dit artikel wordt aandacht besteed aan een specifieke opbouw van de remote-lototo-unit waarbij frequentieregelaars (Power Drive Systems (PDS) worden gebruikt. De speciale drives conform EN 61800-5-2 hebben een ingang waarmee de drive veilig kan worden afgeschakeld zodra deze ingang laag is.
Door Paul Hoogerkamp, Pouw Jongbloed en Aart van Ginkel
In veel gevallen wordt het afschakelen van deze drives door het laag houden van deze ‘safety ingang’ gezien als een veilige situatie. Of de veiligheid daardoor werkelijk is geborgd zal nader moeten worden onderzocht. Hierbij zijn de in de eerdere artikelen aangehaalde normen EN 60204-1 en EN-ISO 14118 van belang.
De basis
Zoals in voorgaande artikelen reeds aan de orde is geweest, is het veilig afschakelen niet per definitie gelijk aan het veilig afgeschakeld houden. In slechts een aantal gevallen mag de STO-ingang op een drive conform EN 61800-5-2 worden gebruikt om het onverwacht opstarten te voorkomen (zie kader). Teneinde het onverwacht opstarten van motoren die worden gevoed door dergelijke drives te voorkomen (bijvoorbeeld bij onderhoud, reiniging, opheffen blokkades, beladen, ontladen van machines, enzovoort) moeten aanvullende maatregelen worden getroffen. Zo’n maatregel is bijvoorbeeld het afschakelen, aarden/kortsluiten van de motor of gebruiker zoals in de eerdere artikelen is vermeld.
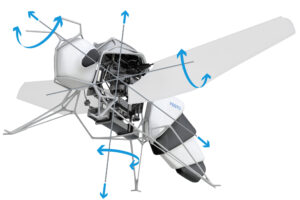
Gelet op de getoonde prototypen (afbeelding 1) kan de vraag worden gesteld of al die componenten wel nodig zijn (lees hoge kosten). Bij de ontwikkeling van de prototypen is primair uitgegaan van bestaande op de markt verkrijgbare componenten. Om de totale werking van de remote-lototo te onderzoeken zijn diverse componenten toegevoegd zoals een hoofdschakelaar en een motorunit. Het hart van de remotelototo unit bestaat echter uit een paar essentiële componenten, namelijk de nul-volt detectie om de spanning op de afgaande velden te meten (PUZ3 van Pilz), een controller (bijvoorbeeld PNOZ van Pilz of S7 van Siemens) en een extra vermogensautomaat (in het prototype is een Eaton toegepast) om de aarding en kortsluiting te bewerkstellingen. Om de besturing te laten functioneren is een continue voeding noodzakelijk (hiervoor zijn Weidmuller componenten gebruikt). Indien de remotoloto componenten worden ingebouwd in een bestaande schakelkast is een controle op de toegang via de deur van de schakelkast noodzakelijk (in het getoonde prototype zit een deurvergrendeling van Euchner).
Uiteraard kunnen ook andere merkcomponenten worden gebruikt mits deze voldoen aan de specificaties. De remotelototo unit wordt in feite met een paar basiscomponenten opgebouwd. Met die gedachte is gekeken hoe de oplossing zou moeten zijn bij frequentieregelaars (conform EN 61800-5-2) met grotere vermogens. In de getoonde prototypes wordt in feite de ingang van de drive afgeschakeld en kortgesloten.
N.B.: De drive in het prototype van de firma Nord is met de motor geïntegreerd (rechts op afbeelding 1, links op afbeelding 7).
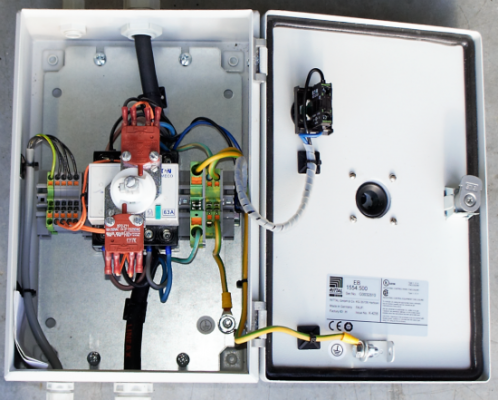
Afbeelding 7. Werkschakelaar met voorijlend contact in prototype en details.
Safe Power Drive Systems
In afbeelding 2 is de safety drive (PDS) schematisch getekend. Na de driefasen-voorbeveiliging volgt de al of niet gestuurde gelijkrichtbrug (converter), gevolgd door de condensator en de tussenkring die bestaat uit een interne of externe remweerstand (hier niet getekend). Vervolgens wordt via DC/AC-inverter de motor aangestuurd. De inverter is in het kader van remotelototo het meest bepalend.
Niet altijd is een remweerstand noodzakelijk. Voor grotere vermogens is het gebruikelijk de energie terug te leveren aan het net. Andere opties zijn meerdere frequenti regelaars en het toepassen van een DC bus om de tussenkringen van de verschillende regelaars met elkaar te verbinden. In een dergelijk geval kan de energie die wordt verkregen bij het afremmen worden gebruikt voor het voeden van de andere regelaars
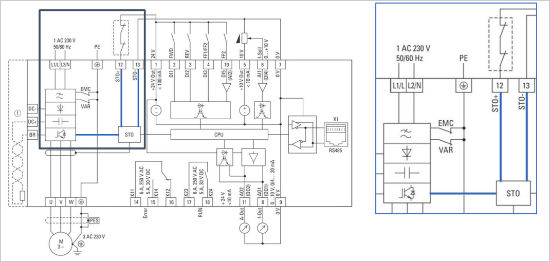
Afbeelding 3. Schematische opbouw van een PDS (rechts het veiligheidsdeel uitvergroot).
Een meer gedetailleerd schema van de PDS is in afbeelding 3 getoond. De STO-ingang (Safe Torque Off) zorgt ervoor dat de frequentieregelaar de pulsvormige stuursignalen naar de eindtrap/inverter (in afbeelding rechts het blok STO) onderbreekt.
De speciale uitvoering van de ‘veiligheids’ PDS (conform EN 61800-5-2) is voorzien van een zogenoemde enable ingang om de STO-situatie te bereiken. Als deze ingang laag is, worden de halfgeleiders in de inverter van de PDS uitgeschakeld. Deze wijze van afschakelen betekent niet dat de last nu van de voeding gescheiden is. De motor is hiermee niet als zodanig ‘veilig gesteld’. Immers, het veilig stellen houdt in dat er een fysieke scheiding moet zijn en dat is (nog) niet mogelijk met halfgeleiders. Bij de STO-drives wordt het veilig uitschakelen bereikt door de twee in serie geschakelde ‘Normally Closed’-contacten (streeplijnkader in afbeelding 3). Deze NC-contacten garanderen dus een veilige afschakeling, maar niet het veilig afgeschakeld houden. Er zal dus een aanvullende voorziening moeten worden getroffen om het afgaande veld naar de motor veilig te stellen.
Het onderbreken van de STO-ingang is voldoende om bij een noodstop of een veiligheidsfunctie, zoals een lichtscherm, de drive veilig uit te schakelen. Afhankelijk van het merk wordt hiermee minimaal PLc/SIL1 conform EN-ISO 13850 (noodstop norm) bereikt. De documentatie en fabrikantverklaring over de drive geven hier de exacte te verkrijgen waarde aan.
STO als werkschakelaar?
Het gebruik van de STO voor de toepassing als werkschakelaar is vanwege het ontbreken van een scheiderfunctie niet zonder aanvulling mogelijk voor alle toepassingen. Het meest eenvoudig lijkt het om de drive te beschouwen als een willekeurige aanzetter, zoals een ster/driehoek, direct online, softstarter of gewone drive. In dat geval kan altijd een werkschakelaar met scheiderfunctie in de hoofdstroom van aanzetter naar de motor worden toegepast. In de praktijk is dit gelimiteerd door verkrijgbaarheid en prijs voor dergelijke werkschakelaars met een scheiderfunctie. Praktisch ligt die grens in het algemeen bij 30 kW asvermogen.
Het gevaar bij een drive is dat dat bij het afschakelen van een draaiende motor er sprake is van een korte onderbrekingstijd. Deze korte onderbrekingstijd (Δt) van de stroom (i) zorgt voor een hoge spanningspiek (Δi/Δt). Door de tegen-EMK van de motor kan dat gevolgen hebben voor de drive of de tussenkring. Normaal vangen de vrijloopdioden dit wel op maar de energie moet wel kunnen worden afgevoerd om te voorkomen dat de spanning in de tussenkring te hoog oploopt. Daarom lijkt het beter om aan de primaire zijde te onderbreken. Nadeel daarvan is de lange kabels die extra nodig zijn om de werkschakelaar bij de motor te kunnen plaatsen (afbeelding 5). Deze methode van schakelen kan dus de prullenbak in of de drive moet direct bij de motor geplaatst zijn (zie afbeelding 7).
Afbeelding 5. Frequentieregelaar met werkschakelaar in het veld.
Alternatieven
Gelukkig zijn er alternatieven. Het meest eenvoudige is bijvoorbeeld door bij het schakelen in de hoofdstroom tevens de STO-ingang te betrekken. Door een voorijlend hulpcontact op te nemen in de werkschakelaar kan hiermee voor het verbreken van de hoofdstroom (tegen-EMK!) eerst de drive gedwongen worden veilig af te schakelen. Afhankelijk van de belasting kan hiervoor enige tijd benodigd zijn.
Om deze spanning aan het afgaande veld af te schakelen is gebruik gemaakt van de enable-ingang van de STO-drive (afbeelding 6). Hierbij moet worden aangetekend dat de werkschakelaar iets gemodificeerd is om te vermijden dat de drive risico’s loopt. Deze modificatie is gerealiseerd met bestaande componenten, namelijk een voorijlend contact. In afbeelding 7 is het prototype van deze werkschakelaar met hulpcontacten afgebeeld. Dit voorijlend contact (afbeelding 7, rechts) zorgt er voor dat het afgaande veld wordt onderbroken, doordat de STO enable ingang laag wordt. Bij het inschakelen geldt eveneens dat de enable-ingang pas moet worden geschakeld als het afgaande veld weer is ingeschakeld. In feite wordt de werkschakelaar ingezet zodra er geen stroom op de fasen staat.
N.B.: In afbeelding 7 is de motor met geïntegreerde frequentieregelaar te zien. Een dergelijke drive had ook in de besturingskast kunnen worden ondergebracht, maar is hier niet getoond.
Kritische kanttekeningen
Een aantal kritische kanttekeningen bij deze oplossing moet worden gemaakt. Er moet enige tijd zitten tussen het afschakelen van de STO-ingang en het uitschakelen van het afgaande veld tussen de frequentie drive en de motor. Dit wordt bereikt doordat de werkschakelaar niet tegelijk de STO-ingang deactiveert en de afgaande velden kan onderbreken. Ook als de STO-ingang niet functioneert wordt de drive toch uitgeschakeld. In dat geval moet door de werkschakelaar de volle belasting worden afgeschakeld. Ergo, de werkschakelaar moet hier wel op worden gedimensioneerd! Vandaar dat deze oplossing bruikbaar is tot vermogens van circa 30 kW. Bovendien als de STO-ingang niet functioneert, moet de drive toch worden nagekeken of worden vervangen!
Remote-loto via STO?
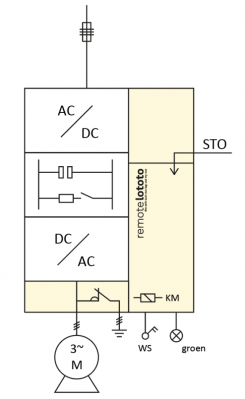
Voor grotere vermogens is de remote-loto een bruikbaar alternatief. De werkschakelaar hoeft daarbij de motorstroom niet te onderbreken en te scheiden. Met de STO-ingang wordt de motorstroom afgeschakeld. Het scheiden wordt op een andere wijze verkregen; namelijk door de zelfde truc als bij de eerder besproken remote-lototo waarbij de afgaande velden worden onderbroken en tevens kortgesloten (afbeelding 8).
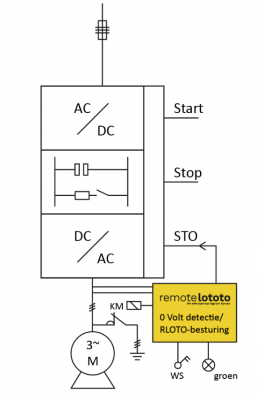
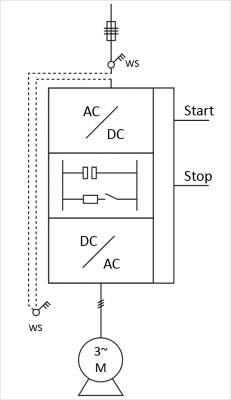
Afbeelding 8. Frequentieregelaar met remote-lototo-werkschakelaar in het veld.
In feite komt de schakeling neer op hetgeen in de voorgaande artikelen is beschreven. Zodra de werkschakelaar (WS) in het veld is geactiveerd wordt door de extra besturing de STO-ingang gedeactiveerd (laag gemaakt). Vervolgens wordt gecontroleerd of er nog spanning op het afgaande veld staat. In afbeelding 8 is dit aangegeven met de dubbele/redundante lijnen links van het geelgekleurde blok. Zodra de spanning op de afzonderlijke aders van dat veld onder 10 Volt is gezakt valt het relais KM af waardoor dit afgaande veld naar aarde wordt kortgesloten en de groene lamp gaat branden.
Afbeelding 9. Frequentieregelaar met remote-lototo-insteekkaart (toekomst…).
Hoe verder?
In de nabije toekomst is het de uitdaging aan ons en de industrie om een module te maken waarbij de remote-lototo is geïntegreerd (afbeelding 9). Eventueel met een extern aangebrachte contactor voor het realiseren van de benodigde kortsluiting. Voor een hoge mate van betrouwbaarheid dient deze contactor uiteraard te zijn voorzien met de hiervoor benodigde terugkoppelcontacten.
Met een dergelijke insteekkaart naast de drive wordt het inbouwen en aansluiten van deze drives vereenvoudigd, is tevens voldaan aan de EN-ISO 14118, EN-ISO 13849-1 en 2 / EN 62061, EN 60204-1 en wordt door een eenvoudige ingreep het veilig uitschakelen en uitgeschakeld houden gecombineerd. Ook voor de Noord-Amerikaanse markt kan worden voldaan aan de NFPA 79, NFPA 70 en de UL 6420.
In deel VII wordt ingegaan op de remote-loto-software.
Anderen lazen ook