17 feb. 1999
1 minuut
Er zijn autonome toestellen die kunnen vliegen en er zijn er die kunnen rijden. Als ze het alle twee zouden kunnen, wordt het mogelijk om op plaatsen te komen waar ander machines niet bij kunnen. Dat zou ze bijzonder geschikt maken voor zoek- en reddingsoperaties – of het afleveren van pakketten. Daarom ontwikkelde een team van MIT’s Computer Science and Artificial Intelligence Laboratory (Csail) een vloot autonome drones die zijn uitgerust met rotors en wielen. Zo krijg je machines die naar een rampgebied kunnen vliegen en dan in de gaten van ingestorte gebouwen naar binnen kunnen gaan om naar overlevenden te zoeken.
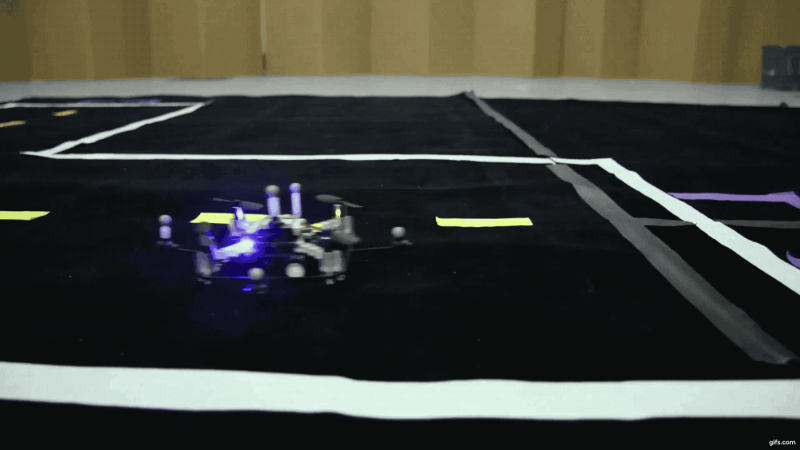
Het team baseerde de nieuwe drones op een eerdere robot, de ‘flying monkey‘ die door een van de teamleden al eerder was ontwikkeld. Deze vliegende aap kan vliegen, zich vastgrijpen en rondkruipen en – springen. De nieuwe machines zijn echter autonoom en volgepakt met routeplanningsalgoritmen die rvoor zorgen dat de acht drones in de vloot niet tegen elkaar of tegen andere voorwerpen botsen. Verder zijn aan de onderkant van elke drone twee wielen met kleine motoren aangebracht. Tijdens testvluchten bleek dat deze extra onderdelen door hun gewicht ten koste gingen van 14 procent van de actieradius. Dat verlies wordt gecompenseerd door een grotere efficiency doordat rijden minder vermogen kost dan vliegen.
De drones werken zo goed, dat de onderzoekers geloven dat ze een nieuwe benadering presenteren voor het ontwerpen van vliegende auto’s. Directeur Daniela Rus van Csail verklaarde: "Waar we beginnen met de ontwikkeling van besturingsalgoritmen voor vliegende auto’s, is het bemoedigend om te zien dat we al robots kunnen maken met deze mogelijkheden op kleine schaal. Vanzelfsprekend zijn er nog grote uitdagingen bij het opschalen naar voertuigen die daadwerkelijk mensen kunnen transporteren, maar we raken geïnspireerd door de mogelijkheden van een toekomst waarin vliegende auto’s kunnen zorgen voor snel, ‘verkeersvrij’ transport."
De drones en hun routeplanningsalgoritmen zijn te zien in onderstaande video, waar ze navigeren in een kleine, geïmproviseerde omgeving met kartonnen dozen als gebouwen.
Bron: MIT
Anderen lazen ook