17 feb. 1999
1 minuut
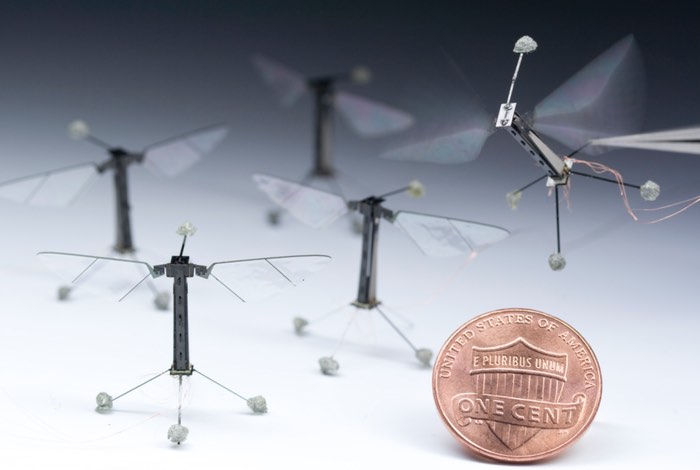
De Amerikaanse universiteit Harvard heeft een minuscule robotbij (robobij) ontwikkeld die niet alleen stabiel vliegt in de lucht, maar ook kan‘vliegen’ onder het wateroppervlak.
Het basis-idee is dat zwemmen in essentie heel erg lijkt op vliegen. In beide gevallen moet je een voortbeweging realiseren door het bewegen van een vleugel of vin. Hoe minder dicht de stof is waar je doorheen beweegt, hoe sneller de vleugels moeten bewegen.
Zwemmende robobij
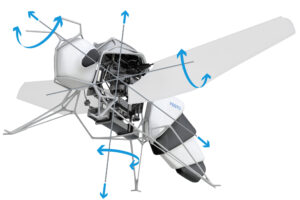
Het kunstje van de robobij is mogelijk dankzij een aanpassing in de frequentie waarmee de vleugels klapperen. Vliegt een robobij door de lucht, dan bewegen de vleugels met een snelle trilling van 120 Hz, terwijl de vleugels in water met een frequentie van 9 Hz bewegen. De drie-assige besturing is onder water vrijwel hetzelfde als in de lucht, dus ook onder water kan de robot sturen.
Probleem
Omdat de robobij zo klein is, ontstaat er wel een ander probleem: oppervlaktespanning. Omdat de kracht van de oppervlaktespanning relatief groot is, heeft de robot wat moeite met het doorbreken van het wateroppervlak en zal standaard blijven drijven. Om dit probleem tegen te gaan moet de robobij als het ware een noodlanding maken in het water.
Daarnaast zijn de vleugels van de robot behandeld met een zogenaamde ‘surfactant’. Dit is een amfifiele stof, waarvan de moleculen voor een deel oplossen in water en voor een deel niet. Dit verlaagt de oppervlaktespanning tussen twee stoffen. Denk aan hoe afwasmiddel werkt en je hebt een idee van dit principe.
Doorontwikkeling
Het terugkeren vanuit water naar de lucht is nog wel een moeilijk probleem. Dit blijkt namelijk lastiger te zijn dan de overgang van lucht naar water. De onderzoekers van Harvard hopen dit probleem echter ook snel te kunnen tackelen.
Anderen lazen ook